用CloudCompare实现两帧点云数据的精准对齐
用CloudCompare实现两帧点云数据的精准对齐
一、背景及原理1、什么是点云对齐?2、为什么需要点云对齐?3、基本原理:ICP算法
二、对齐效果对比1、未对齐前的点云2、对齐后的点云
三、详细操作步骤1、下载并安装CloudCompare2、加载点云数据3、启动ICP配准功能4、配置ICP参数5、配准结果6、合并点云7、最终效果
四、注意事项五、总结
用CloudCompare实现两帧点云数据的精准对齐
一、背景及原理
1、什么是点云对齐?
点云对齐(点云配准)是将从不同位置、角度采集的多组点云数据,通过旋转和平移变换,统一到同一个坐标系下的过程。这就像是将多张从不同角度拍摄的照片拼接成一张全景图,只不过这里处理的是三维空间中的点数据。
2、为什么需要点云对齐?
当使用激光雷达扫描大型场景或物体时,通常需要从多个位置进行扫描,因为单个视角无法捕捉到全部细节。将这些不同位置的扫描数据融合在一起,才能获得完整的三维模型。在实际应用中,点云对齐广泛应用于自动驾驶、三维建模、文物保护、工业检测等领域。
3、基本原理:ICP算法
本文使用的ICP(Iterative Closest Point,迭代最近点)算法是最常用的点云配准算法之一。它的基本原理是:
在两帧点云中寻找最近的点对计算这些点对之间的最优变换矩阵(旋转和平移)应用这个变换到其中一帧点云迭代上述过程直到满足收敛条件
下图展示了两个激光雷达的安装位置关系,我们需要将它们采集的数据对齐融合:
雷达安装位置

二、对齐效果对比
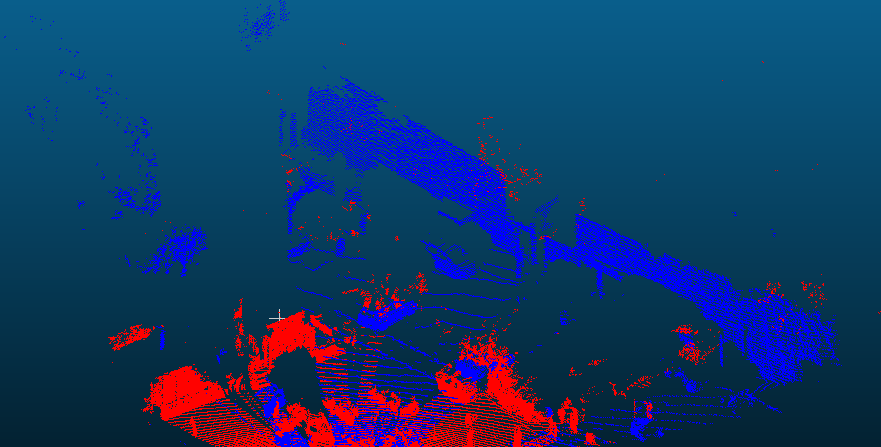
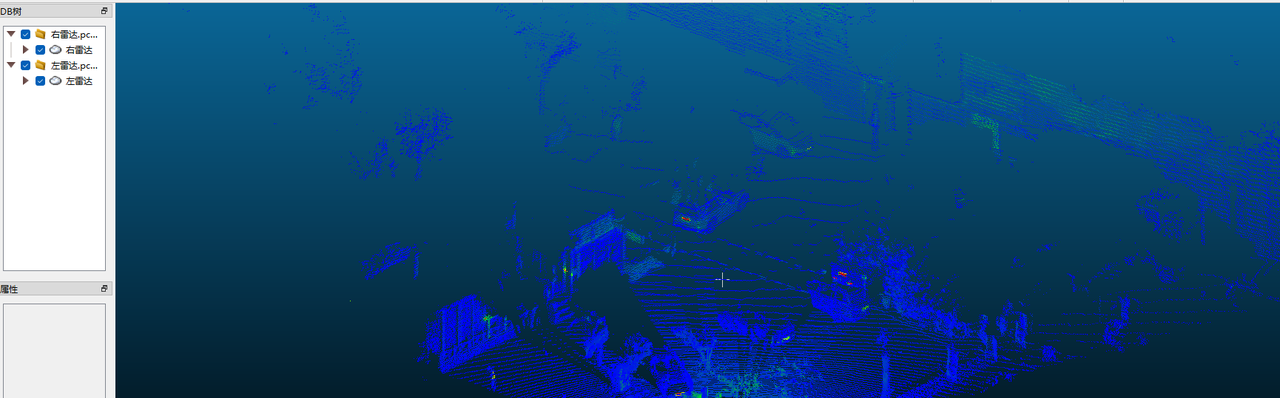
1、未对齐前的点云
如下图所示,左雷达的朝向不对
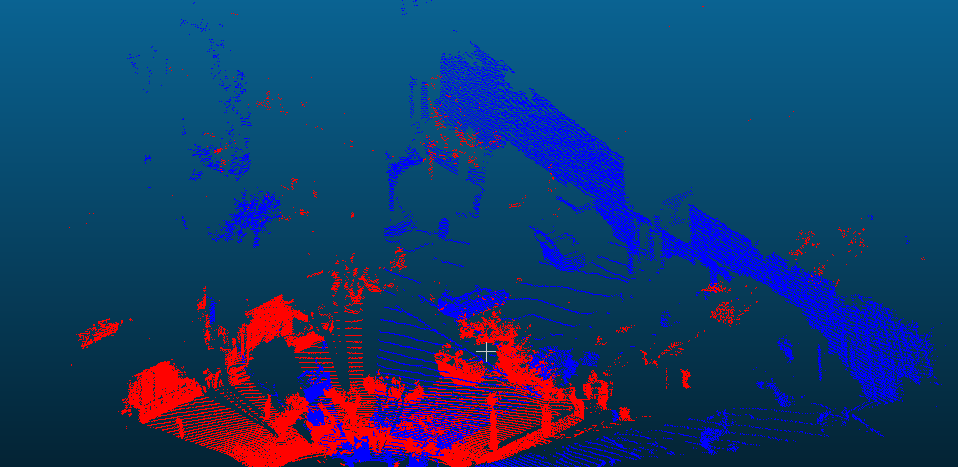
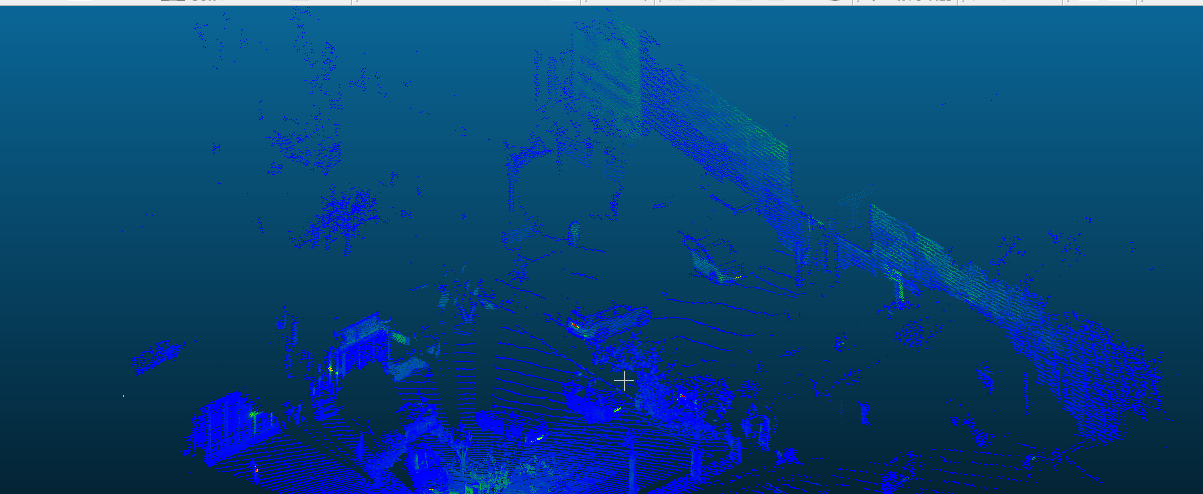
2、对齐后的点云
经过ICP配准后,两帧点云完美地融合在一起,形成了统一、连贯的三维场景:
三、详细操作步骤
1、下载并安装CloudCompare
下载开源点云处理软件CloudCompare:下载链接
该软件支持Windows、macOS和Linux系统,请选择适合您操作系统的版本下载并安装。
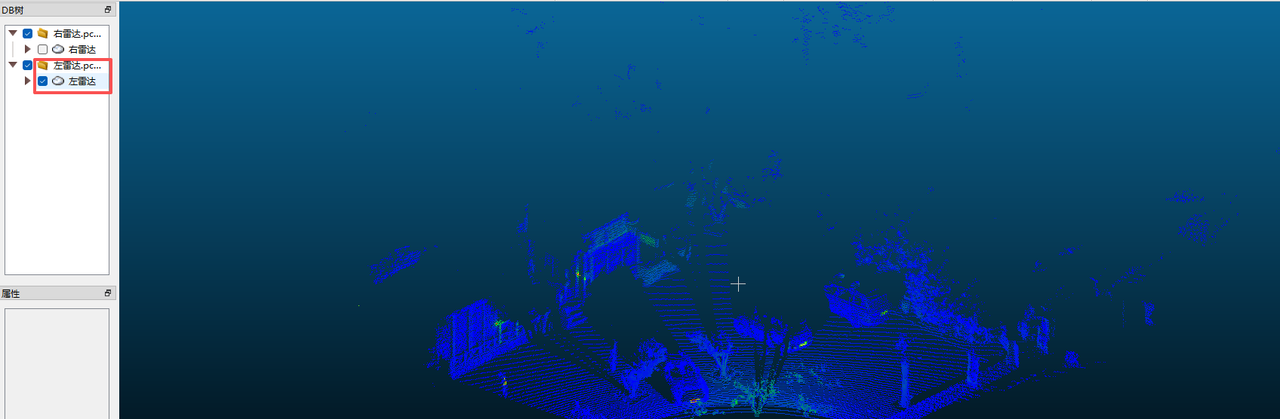
2、加载点云数据
打开CloudCompare后,加载两帧点云:
A、只显示左雷达点云:
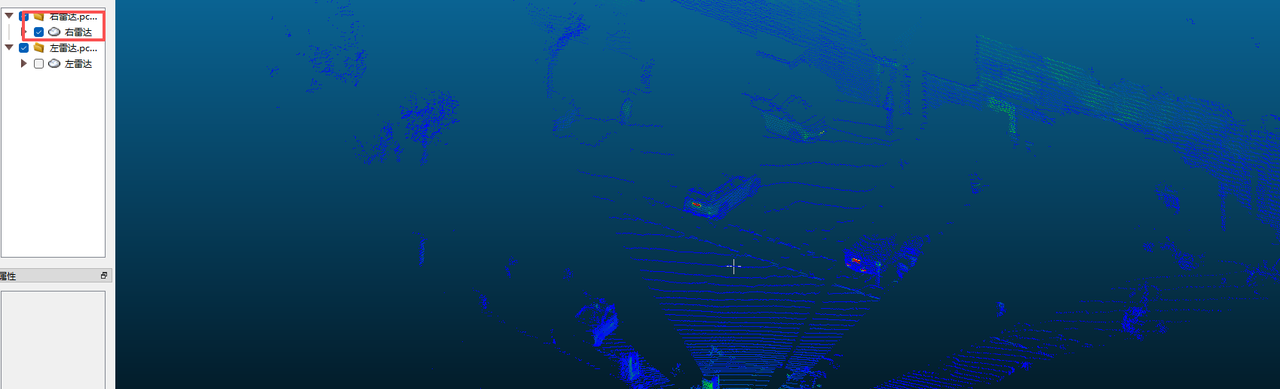
B、只显示右雷达点云:
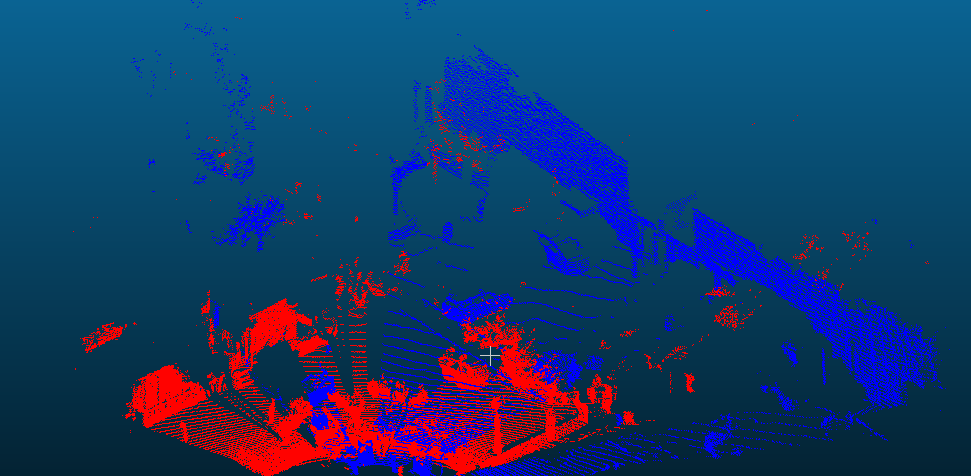
C、同时显示左右雷达点云:
可以看到两帧点云明显没有对齐:
3、启动ICP配准功能
选中二帧点云
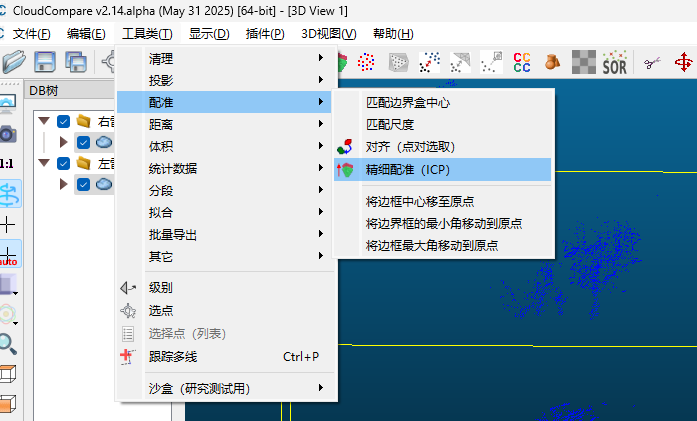
4、配置ICP参数
在ICP配准对话框中,需要设置以下参数:
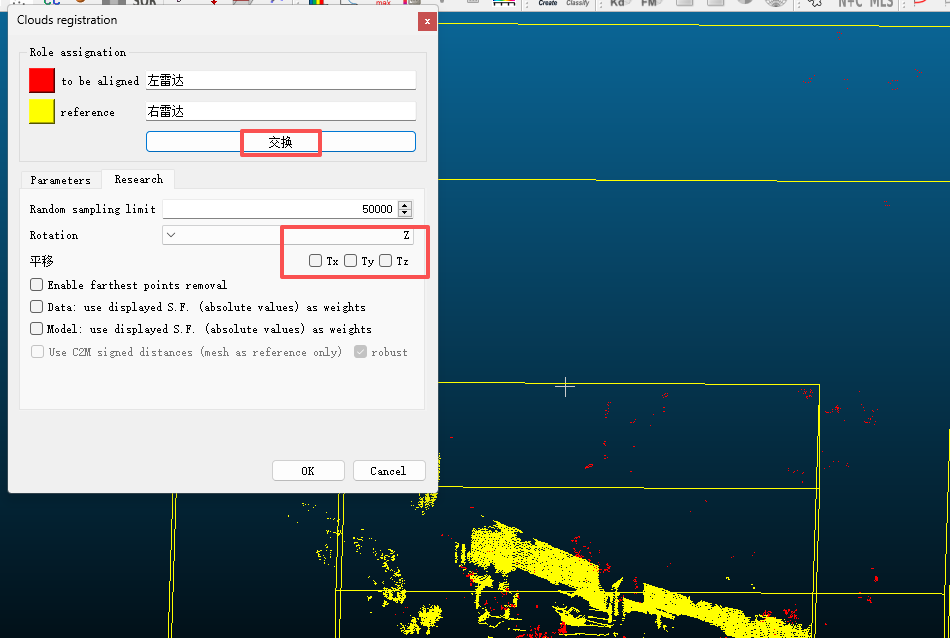
Reference cloud:选择作为参考基准的点云(通常选择较大或较完整的点云)Aligned cloud:选择需要被变换对齐的点云RMS difference:设置收敛阈值,值越小配准越精确但计算时间越长Number of iterations:设置最大迭代次数
5、配准结果
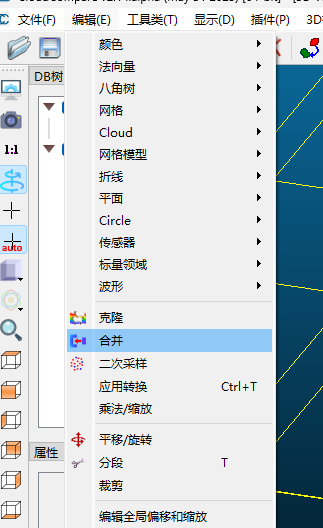
6、合并点云
对齐完成后,将两帧点云合并为一个整体:
7、最终效果
合并后的点云形成了一个完整、连贯的三维场景,可以用于后续的分析和应用:
四、注意事项
初始位置:ICP算法对初始位置较为敏感,如果两帧点云初始位置相差太大,可能需要先进行手动粗配准重叠区域:两帧点云需要有足够的重叠区域(建议30%以上),否则配准可能失败点云质量:噪声过多或特征不明显的点云会影响配准精度计算资源:大数据量的点云配准需要较多的计算资源和时间
五、总结
通过CloudCompare的ICP配准功能,我们可以有效地将多帧点云数据精确对齐并融合,为三维重建、场景分析等应用提供高质量的数据基础。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...