可进入店铺里选择各种你需要的系统 如没合适的可开发
产品参数介绍:
·四. 7寸屏可编程界面。
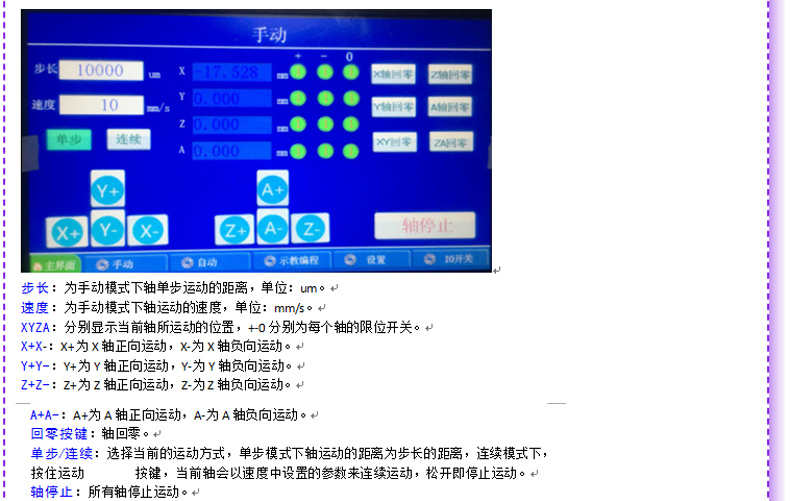
·4.1 手动界面操作说明
步长:为手动模式下轴单步运动的距离,单位:um +/-
速度:为手动模式下运动的速度,单位: mm/s
XYZA:分别显示当前各轴运动的位置,+0分别为每个轴的极限开关。
X+X-: X+为X轴正向运动,X-为X轴负向运动。
Y+Y-: Y+为Y轴正向运动,Y-为Y轴负向运动。
Z+Z-: Z+为Z轴正向运动,Z-为Z轴负向运动。
A+A-: A+为A轴正向运动,A-为A轴负向运动。
回零技术:轴回零。
单步/连续:选择当前的运动方式,单步模式下轴运动的距离为步长的距离,连续模式下,按住键当前轴将以速度中设置的脉冲来连续运动,松开键立即停止运动。
暂停停止:所有轴停止运动。
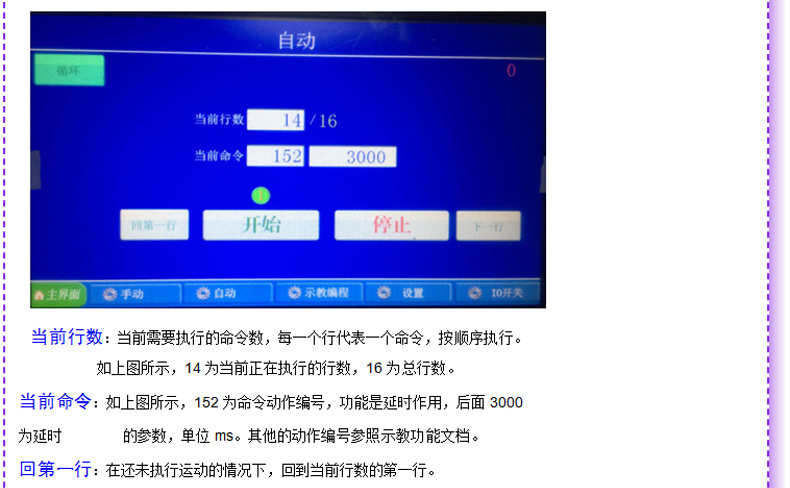
·4.2 自动界面操作说明
当前行数:当前需要执行的命令行数,每个命令代表一个动作,按顺序执行。如上图所示,14为当前正在执行的行数,16为总行数。
当前命令:如上图所示,152为命令动作编号,功能是延时作用,后面3000为延时参数,单位 ms。其他的动作编号参照示教功能文档。
回第一行:在还未执行运动的情况下,回到当前行数的第一行。
下一行:在还未运动的情况下,跳转到当前行数的下一行。
开始:从当前行数开始执行。
停止:立即停止所有运动。
循环:循环状态下,循环执行当前所有命令,比如当前行数是16,在执行完16行命令之后,会重新从第一个行命令开始执行,一直循环。非循环状态下,仅按照顺序执行一次当前所有命令。
XYZA,步长,速度:这几个参数与手动界面对应的参数同步。
跳转:点击跳转参数设置,选择要跳转的行,再点击跳转即跳转到当前行数。
UP:当前行数往上移一行。
DOWN:当前行数往下移一行。
最后一行:跳至最后一行。
增加位置:增加四个轴的运动指令,目标位姿为当前位置。
等待停止:增加等待停止的命令。
全删除:删除当前所有命令。
删除行:删除当前行的命令。
保存:将当前所有命令保存至TF卡,保存位置为:cendom.TXT。
等待DIN:等待DIN为0命令。
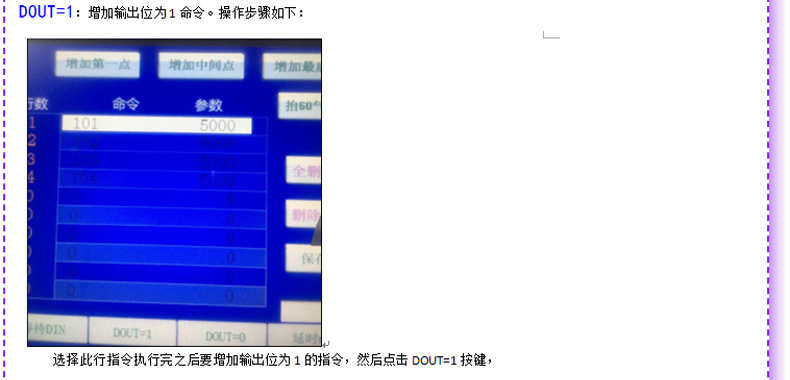
DOUT=1:增加输出位为1命令。操作步骤如下:选择此行命令执行完之后要增加输出为1的指令,然后点击DOUT=1按键。






© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...