我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是系统思考、大胆设计、小心求证;三是“一张纸制度”,也就是无论多么复杂的工作内容,要在一张纸上描述清楚;四是要坚决反对虎头蛇尾,反对繁文缛节,反对老好人主义。
不觉间来到八月,横坐在电脑前,敲击点文字,对自己也算一个时间的记忆,多年后再次点击,也期待那时会像触发记忆的闸口,让现在的这点岁月传递至那时那刻。

三、主流EEA架构发展方向
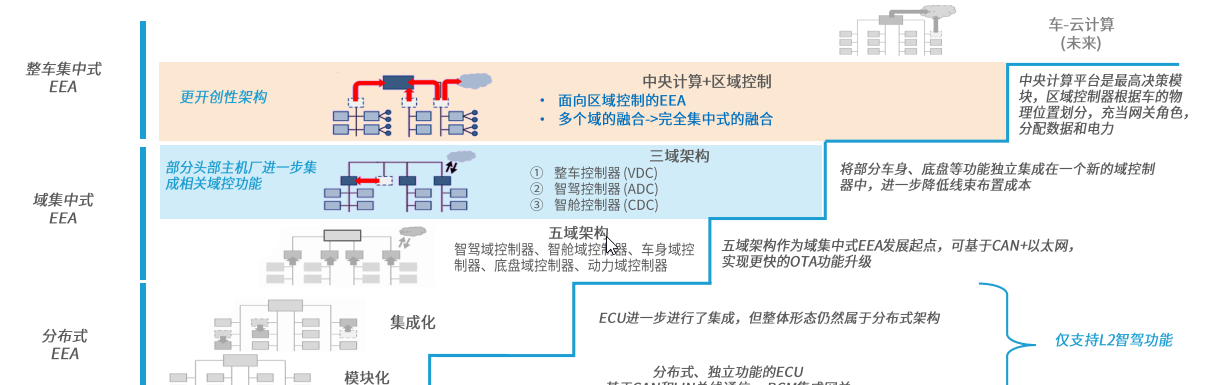
整车电子电气架构(EEA)的演进,恰似一部波澜壮阔的科技史诗,在汽车工业的发展长河中书写着关键篇章。其发展历程清晰地划分为三个具有标志性意义的阶段:分布式EEA、域集中式EEA以及整车集中式EEA,每一个阶段都见证了汽车技术从分散走向集成、从简单迈向智能的巨大跨越。
1、分布式
在分布式EEA阶段,电子控制单元(ECU)呈现出模块化与集成化的特点,但整体上仍属于分布式架构。各个ECU分布独立,具备特定功能,它们基于控制器局域网(CAN)和本地互联网络(LIN)总线进行通信,车身控制模块(BCM)则充当集成网关的角色。然而,此阶段架构仅支持L2级别的智驾功能,在智能化程度和功能扩展性上存在一定局限。
此阶段汽车内的各个电子控制单元(ECU)如同一个个独立的“小王国”,各自负责特定的功能,它们之间通过复杂的线束进行通信。这种架构虽然在一定程度上满足了当时汽车功能的需求,但随着汽车功能的不断增加和复杂化,其弊端也日益凸显,线束冗长复杂、通信效率低下、成本高昂等问题逐渐成为制约汽车技术进一步发展的瓶颈。
2、域集中式
随着技术发展,域集中式EEA应运而生。部分头部主机厂在该阶段进一步集成相关域控功能。其中,五域架构作为域集中式EEA的发展起点,包含智驾域控制器、智舱域控制器、车身域控制器、底盘域控制器以及动力域控制器。它可基于CAN与以太网,实现更快的空中下载技术(OTA)功能升级,将部分车身、底盘等功能独立集成在一个新的域控制器中,有效降低了线束布置成本。而三域架构则包括整车控制器(VDC)、智驾控制器(ADC)和智舱控制器(CDC),在功能集成与管理效率上更进一步。
3、中央计算 + 区域控制
汽车电子电气架构正朝着整车集中式EEA大步迈进。在这个阶段,头部主机厂纷纷踏上了基于“中央计算 + 区域控制”的整车集中式架构的探索之旅。中央计算平台宛如汽车的“超级大脑”,具备强大的计算能力和数据处理能力,能够对全车的信息进行统一分析和决策;而区域控制器则如同分布在汽车各处的“神经末梢”,负责收集和执行本地信息,实现与中央计算平台的高效协同。这种架构的变革,使得汽车在智能化、网联化方面取得了质的飞跃,为实现更高级别的自动驾驶和智能座舱功能提供了坚实的架构支撑。
在技术发展的多元格局下,少部分智驾方案商和主机厂出于对技术稳定性、开发周期和成本控制等多方面因素的综合考量,选择了更为成熟的“三域架构”阶段。在这一架构中,多盒方案成为了实现功能部署和OTA升级的“得力助手”。多盒方案将不同的功能模块分别封装在独立的盒子中,在实现不同功能的部署时,各个盒子可以独立开发、测试和验证,大大降低了技术要求的复杂度;在进行OTA升级时,也只需针对特定的盒子进行操作,减少了工程化的挑战,提高了升级的效率和可靠性。
尽管多盒方案在现阶段展现出了其独特的优势,但从汽车技术发展的长远趋势来看,面向区域控制的EEA无疑具有更为广阔的发展前景。它凭借更低的线束成本,为汽车制造商在激烈的市场竞争中赢得了成本优势,使得更多的资源可以投入到核心技术的研发和创新中;同时,更易实现软硬解耦的特性,让汽车的软件开发和硬件升级变得更加灵活和便捷,能够快速响应市场需求的变化,为用户带来更加丰富和个性化的智能驾驶体验。
可以预见,随着技术的不断进步和市场需求的持续推动,面向区域控制的EEA将逐渐成为汽车电子电气架构的主流发展方向,引领汽车行业迈向一个更加智能、高效、绿色的未来。
三、当前现状
在完全集中式架构全面落地之前的这段过渡时期,汽车电子电气架构领域呈现出多种拓扑结构并存的复杂现状。这就好比在技术变革的十字路口,各路“行者”依据自身的“行囊”(企业特点)与“行进能力”(研发能力),选择着不同的前行路径。
各主机厂纷纷结合自身独特的基因和研发实力,精心布局着各具特色的技术路线。其中,采用中央计算平台或者“三域 + 区域控制器(ZCU)”的方案成为了较为常见的选择。中央计算平台如同汽车的“超级智慧中枢”,统筹全局;而“三域 + 区域控制器”方案则像是一个分工明确的“团队协作体系”,各部分协同运作,共同支撑起汽车的智能化功能。
在这一探索过程中,不同主机厂的电子电气架构(EEA)存在着显著差异。ZCU在各架构中所扮演的角色犹如舞台上的不同演员,有的承担着更为核心的“主演”任务,有的则作为重要的“配角”发挥辅助作用。同时,ZCU的算力部署也各不相同,这就好比为演员分配不同的“表演能力”,有的具备强大的运算“演技”,有的则侧重于特定功能的处理。此外,通讯网络的采用也呈现出多样化的特点,不同的通讯技术如同不同的“交通路线”,影响着信息在汽车内部的传输效率和稳定性。

随着车载通讯技术的不断革新,如同铺设更宽阔、更高效的“信息高速公路”,以及硬件产品的持续升级,如同为汽车配备更强劲的“动力引擎”,未来汽车电子电气架构的发展路径必将逐渐清晰明朗,引领汽车行业迈向更加智能、高效的新时代。
在当下汽车电子电气架构(EEA)的发展格局中,区域控制器宛如一颗璀璨的“明星”,占据着举足轻重的地位,是当前阶段EEA里不可或缺的重要功能模块,为汽车的智能化运作提供着强大的数据处理等关键功能。
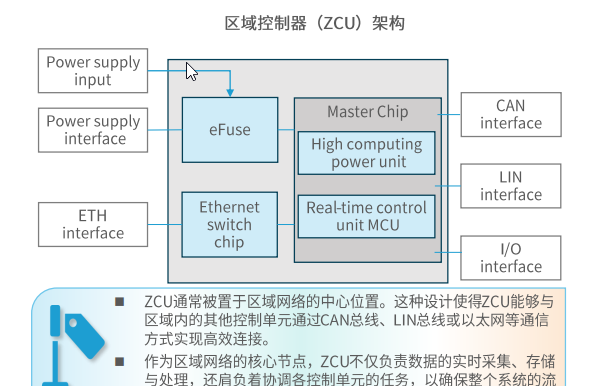
区域域控制器(ZCU)堪称EEA的核心“中枢神经”组件,肩负着管理和掌控特定区域内各类电子设备与系统的重大使命。它就像是一位精明的区域“大管家”,将区域内纷繁复杂的电子事务打理得井井有条。
ZCU的功能性丰富且强大,体现在多个关键层面。首先,它化身为区域数据中心,具备实时数据处理的强大能力。在汽车的运行过程中,区域内的各个控制单元如同一个个信息“发生源”,源源不断地产生着各类数据。而ZCU则像是一个高效的数据“集散中心”,能够实时地进行数据的采集、存储、处理与分析。这些经过精心处理的数据,就如同为车辆的智能决策提供了精准的“导航图”,为车辆实现各种智能功能奠定了坚实的数据基础。
在实际的汽车应用场景中,ZCU的性能表现犹如汽车整体表现的“晴雨表”,直接关系到智能网联汽车的整体水准。以智能辅助驾驶场景为例,车辆周身遍布的各种传感器就像敏锐的“感知触角”,时刻捕捉着周围环境的信息。这些传感器产生的海量数据会以极快的速度传输至ZCU。此时,ZCU就如同一位经验丰富的“决策大师”,需要迅速且精准地处理这些数据,并作出正确的决策,从而确保车辆在复杂多变的交通环境中安全、稳定地行驶。

正因如此,对于ZCU的设计和优化成为了智能网联汽车研发进程中的关键环节。研发团队就像一群技艺精湛的“工匠”,不断打磨和提升ZCU的性能,力求让它在汽车的智能化舞台上发挥出最大的价值,为智能网联汽车的发展注入源源不断的动力。
四、硬件升级优势
EEA集成化发展带动软硬件系统升级,为智能EV未来功能拓展预留升级空间。EEA(电子电气架构)的升级犹如汽车技术进步的“引擎”,将带动整车硬件架构与软件架构的全面升级,为智能电动汽车(AIEV)未来的功能拓展预留充足的升级空间。

1、硬件架构升级
硬件架构的升级为AIEV的功能拓展铺就了坚实的物理基础。它不仅能够有效提升算力利用率,减少算力设计的总需求,还能实现数据的统一交互,提升整车功能的协同效率,同时缩短整车线束,降低故障率,减轻质量并减少硬件成本。
AIEV在未来功能扩展方面预留了较多的升级空间。通过对比同功能应用在驾驶安全条件下的表现,可以发现域控制/中央集中架构的算力更具性价比。传统主机厂方案中,一个功能对应一套感知 – 决策 – 执行硬件的模式,使得感知数据难以交互,也无法协同执行。而域控制器/中央计算平台则像是一个“智慧大脑”,可对采集的数据信息进行统一处理、综合决策和协同执行。
在硬件架构方面,分布式架构下,ECU增多会导致线束更长,错综复杂的线束布置不仅容易引起电磁干扰,增加故障率,还意味着更重的整车质量。而集中式的控制器/中央计算平台的方式则如同一位“精简大师”,能够减少线束长度,从而降低故障率,减轻整车质量。
2、软件架构升级
软件架构正逐渐由Classic AutoSAR向Classic AutoSAR + Adaptive AutoSAR混合式方向发展。以下是两者的对比:

Adaptive AutoSAR具有软实时、可在线升级、操作系统可移植等诸多优势。随着智能辅助驾驶、车联网等应用日益复杂化,Adaptive AutoSAR开始崭露头角。相较于Classic AutoSAR,它的优点显著:作为软实时系统,偶尔超时也不会造成灾难性后果;更适用于多核动态操作系统的高资源环境,如QNX;软件功能可灵活在线升级。
软件架构升级还有利于软硬件解耦分层,就像为汽车的软硬件搭建了一座“灵活桥梁”,利于实现软件/固件在线升级、软件架构的软实时以及操作系统可移植。以AutoSAR为代表的软件架构提供了接口标准化定义和模块化设计,促使软件通用性增强,实现软件架构的软实时、在线升级以及操作系统可移植。
软件架构升级有利于采集数据信息多功能应用,有效减少硬件需求量,真正实现软件定义汽车。在现阶段,自动泊车雷达和自适应巡航的摄像头、雷达采集数据不可交互,若打通整个汽车软件架构,各数据特征得到有效利用,实现多个应用共用一套采集信息,就能大幅减少硬件需求数量。
五、新EEA架构对通信的影响
在汽车智能化浪潮的席卷下,EEA(电子电气架构)的集成化发展已成为推动汽车技术革新的关键力量,而这一进程正有力地带动通讯网络升级,为实现车辆的实时控制和高精度决策筑牢根基。
汽车不再仅仅是传统的交通工具,而是逐渐演变成集智能驾驶、智能座舱、车联网等众多复杂功能于一体的移动智能终端。为了支撑更高带宽的数据传输,满足日益复杂的车辆功能需求,EEA正积极拥抱更先进的通信协议和技术,Ethernet(以太网)、CAN FD等成为了技术升级的“先锋军”。这些前沿技术如同为汽车通讯网络注入了“强心剂”,能够显著提升网络通信的效率和可靠性,为车辆的实时精准控制和复杂决策提供坚实有力的支持。

智能网联汽车的蓬勃发展,使得汽车内部产生的数据呈现出爆炸式增长。大量的非结构化数据,如高清图片、流畅视频等,虽然蕴含着丰富的信息,但对数据传输提出了极高的要求。传统汽车电子电气架构中的LIN/CAN总线,就像狭窄的小道,在面对汹涌的数据洪流时,显得力不从心,无法满足高速传输的需求。而以太网凭借其大带宽、高通量、低延迟的显著优势,宛如一条宽阔的高速公路,将成为汽车主干网络的理想之选,为数据的快速流通开辟畅通无阻的通道。
回顾汽车通讯网络的发展历程,各种技术在不同时期发挥着重要作用。CAN(控制器区域网)自1983年由博世开发以来,作为共享事行总线,以其经济高效、可靠性高的特点,在动力总成、底盘和车身电子设备中得到了广泛应用,但共享访问和较低带宽的缺点也在一定程度上限制了其进一步发展。1994年出现的LIN(局域互联网络),由OEM和技术合作伙伴联盟开发,速率约几十Kbps,成本低于CAN,主要适用于车身电子设备,如镜子、电动座椅和配件等,为车身电子系统的通信提供了经济实用的解决方案。1998年的MOST(媒体定向系统传输),采用环形体系结构,使用光纤或钢缆互连,速率可达约10Mbps,带宽较高,但价格昂贵,最初主要用于摄像头或视频连接,满足了当时多媒体数据传输的需求。2000年的FlexRay,由FlexRay联盟开发,作为速率约10Mbps的共享串行总线,带宽比CAN高,但成本较高,且需要共享使用媒体,主要应用于高性能动力总成和安全系统,如线控驱动、主动悬架和自适应巡航控制,为汽车的安全和性能提升提供了有力支持。2012年博世发布的CAN FD标准,传输速度最高可达8Mbps,它是对原始CAN总线协议的拓展,通过最大限度缩短协议时延和提供更高带宽,实现了更精确和接近实时的数据传输,为汽车通信技术的进步注入了新的活力。

1TPCE即1对双绞线100M以太网,RTPGE为简化版双绞线千兆以太网。采用以太网方案具有诸多显著优势,其中线束更短,能够有效减少安装和测试成本。在汽车零部件中,线束在重量和成本方面都位居第三,尤其是在成本方面,线束安装占人工成本的50%。根据博世的调查数据,在达到同等性能的条件下,通过使用非屏蔽双绞线(UTP)的以太网电缆和更小的紧凑型连接器,连接成本最多可降低80%,线缆重量最多可减轻30%。这不仅有助于降低汽车的生产成本,还能提高生产效率。
随着EEA的不断升级,未来车载以太网的应用渗透率将持续增加。它将成为汽车通讯网络的核心,为智能网联汽车的发展提供强大的通信支撑,推动汽车行业迈向更加智能、高效、安全的新时代。

搁笔分享完毕!
愿你我相信时间的力量
做一个长期主义者
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...