什么是卡尔曼滤波
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器),它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。
卡尔曼滤波器可能是所谓“现代控制理论”中最成功和广泛使用的一部分。 它被用作飞机/船/地面车辆导航,机器人导航、控制,雷达系统以及导弹追踪,航天器姿态确定,轨道确定,导弹引导和控制,射频天线/激光终端目标采集/跟踪,RF /光信号采集等许多应用的算法的中心部分跟踪,地震数据处理,计算机图像处理,头脸识别,图像分割,图像边缘检测,医疗信号处理等行业领域,还有人尝试用来处理股票数据,预测股票的走势。
第一解释一下什么是滤波。字典上的解释是将信号中特定波段频率滤除的操作,是抑制和防止干扰的一项重大措施。数字滤波是通过一种算法排除可能的随机干扰,提高检测精度的一种手段。一般可以理解为就是将观测获得的数据中一些不能反映真相的信息过滤掉,去伪存真。听过最好的一种解释是:滤波就是加权。把有用的数据权数变大,或者全部采信。无用的数据权数变小甚至是零,也就是完全不采信。

鲁道夫.E.卡尔曼
然后,之所以叫卡尔曼滤波是由于这种滤波方法的发明者叫做鲁道夫.E.卡尔曼(Rudolph E. Kalman)标志是他1961年发表的论文,虽然后来根据文献可知实际上Peter Swerling在更早之前就提出了一种类似的算法。但无论如何,这都是位值得大书特书的大牛人。接下来看看他的简历。鲁道夫·卡尔曼(Rudolf Emil Kalman),匈牙利裔美国数学家,1930年出生于匈牙利首都布达佩斯。1953年于麻省理工学院获得电机工程学士,翌年硕士学位。1957年于哥伦比亚大学获得博士学位。1964年至1971年任职斯坦福大学。1971年至1992年任佛罗里达大学数学系统理论中心(Center for Mathematical System Theory)主任。1972起任瑞士苏黎世联邦理工学院数学系统理论中心主任直至退休。先后居住于苏黎世和佛罗里达。2009年获美国国家科学奖章。2016年7月2日,这位巨人陨落了!

2009年卡尔曼获美国国家科学奖章
专业术语
在了解卡尔曼滤波之前,我们必须要掌握一些概率和数理统计的知识。因此让我们先复习或者了解一下涉及到的概念或者术语,只有掌握这些后,才能看懂后面的内容。如果您耐心看完本文,信任会理解的,反而担心列的还不够。
噪声(英语:Noise)在电子学中指,信号在传输过程中会受到一些外在能量所产生信号(如杂散电磁场)的干扰,这些能量即噪声。噪声一般会造成信号的失真。其来源除了来自系统外部,亦有可能由接收系统本身产生。噪声的强度一般都是与信号带宽成正比,所以当信号带宽越宽,噪声的干扰也会越大。所以在评估噪声强度或是系统抵抗噪声能力的数据,是以信号强度对噪声强度的比例为依据,此即信噪比。
白噪声,是一种功率谱密度为常数的随机信号或随机过程。即,此信号在各个频段上的功率是一样的。由于白光是由各种频率(颜色)的单色光混合而成,因而此信号的这种具有平坦功率谱的性质被称作是“白色的”,此信号也因此被称作白噪声。相对的,其他不具有这一性质的噪声信号被称为有色噪声。
正态分布(德语:Normalverteilung;英语:normal distribution)又名高斯分布(德语:Gauß-Verteilung;英语:Gaussian distribution, 以德国数学家卡尔·弗里德里希·高斯的姓冠名),是一个在数学、物理及工程等领域都超级重大的概率分布,由于这个分布函数具有许多超级美丽的性质,使得其在诸多涉及统计科学离散科学等领域的许多方面都有着重大的影响力。
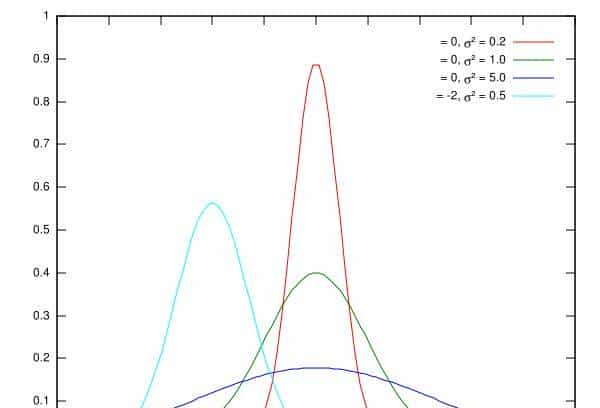
正态分布的概率密度函数曲线呈钟形,因此人们又常常称之为钟形曲线
高斯噪声:是一种具有正态分布(也称作高斯分布)概率密度函数的噪声。换句话说,高斯噪声的值遵循高斯分布或者它在各个频率分量上的能量具有高斯分布。
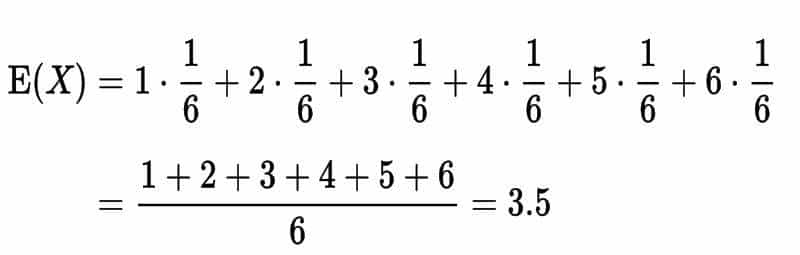
期望:在概率论和统计学中,一个离散性随机变量的期望值(或数学期望、或均值,亦简称期望,物理学中称为期待值)是试验中每次可能的结果乘以其结果概率的总和。换句话说,期望值像是随机试验在同样的机会下重复多次,所有那些可能状态平均的结果,便基本上等同“期望值”所期望的数。需要注意的是,期望值并不必定等同于常识中的“期望”——“期望值”也许与每一个结果都不相等。(换句话说,期望值是该变量输出值的平均数。期望值并不必定包含于变量的输出值集合里。)
例如,掷一枚公平的六面骰子,其每次“点数”的期望值是3.5,计算如下:
方差(Variance),应用数学里的专有名词。在概率论和统计学中,一个随机变量的方差描述的是它的离散程度,也就是该变量离其期望值的距离。一个实随机变量的方差也称为它的二阶矩或二阶中心动差,恰巧也是它的二阶累积量。这里把复杂说白了,就是将各个误差将之平方(而非取绝对值),使之肯定为正数,相加之后再除以总数,透过这样的方式来算出各个数据分布、零散(相对中心点)的程度。继续延伸的话,方差的算术平方根称为该随机变量的标准差。
协方差(Covariance)在概率论和统计学中用于衡量两个变量的总体误差。而方差是协方差的一种特殊情况,即当两个变量是一样的情况。期望值分别为

的两个实数随机变量X 与Y 之间的协方差定义为:


协方差表明的是两个变量的总体的误差,这与只表明一个变量误差的方差不同。 如果两个变量的变化趋势一致,也就是说如果其中一个大于自身的期望值,另外一个也大于自身的期望值,那么两个变量之间的协方差就是正值。 如果两个变量的变化趋势相反,即其中一个大于自身的期望值,另外一个却小于自身的期望值,那么两个变量之间的协方差就是负值。
如果X 与Y 是统计独立的,那么二者之间的协方差就是0,这是由于

但是反过来并不成立,即如果X 与Y 的协方差为0,二者并不必定是统计独立的。
协方差矩阵:在统计学与概率论中,协方差矩阵(也称离差矩阵、方差-协方差矩阵)是一个矩阵,其 i, j 位置的元素是第 i 个与第 j 个随机向量(即随机变量构成的向量)之间的协方差。这是从标量随机变量到高维度随机向量的自然推广。
协方差这里如果没学过有点搞,提议看看下面这个视频,方便理解。
00:00
卡尔曼滤波理论
【这里读者先有个对卡尔曼滤波的感性认识,由于限于篇幅,我们会在开篇跟进继续讲解卡尔曼滤波理论】
卡尔曼滤波理论是Kalman 在1960 年提出来的一种线性自适应滤波算法,
具有两个显著的特点:
(1)用状态空间方程描述对象的数学模型;
(2)求解过程是递归计算,可以不加修改的应用于平稳和非平稳对象过程。
状态的更新都由前一次估计和新的输入观测值计算得到,使用的存储空间小。
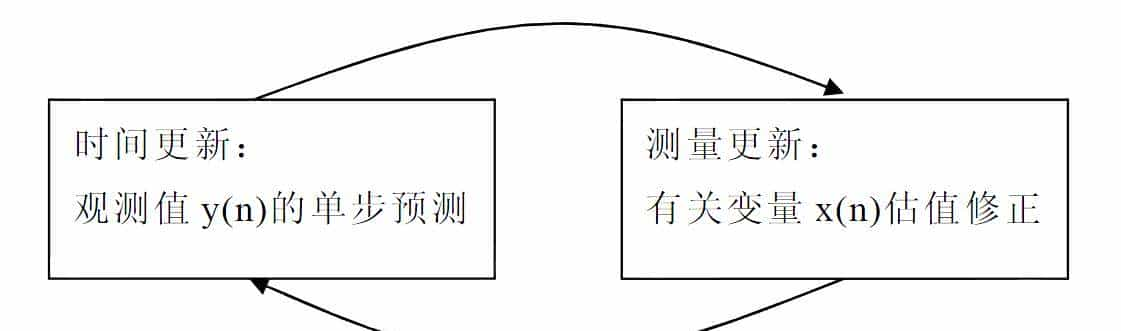
卡尔曼滤波器的基本结构是预测器—修正器,如图所示
卡尔曼滤波器的求解过程
这一结构包括两步:
(1)利用观测值计算称为新息(innovation)的前向预测误差;
(2)利用新息更新与随机变量的观测值线性相关的最小均方估计。
线性离散系统的信号流程如下图所示,流程图描述以下两个方程:
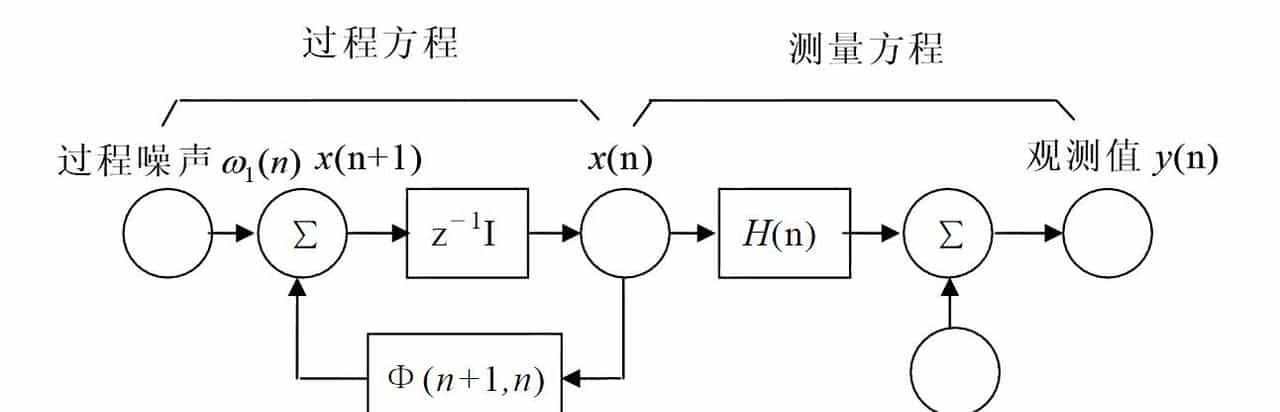
线性离散系统的信号流程
(1)过程方程

x(n)为 M 维状态变量, ω1 ( n) 为 M 维过程噪声,建模为零均值白噪声,协方
差为 Q,Φ(n +1,n)是状态转移矩阵。
(2)测量方程

卡尔曼滤波求解过程可用下图描述:
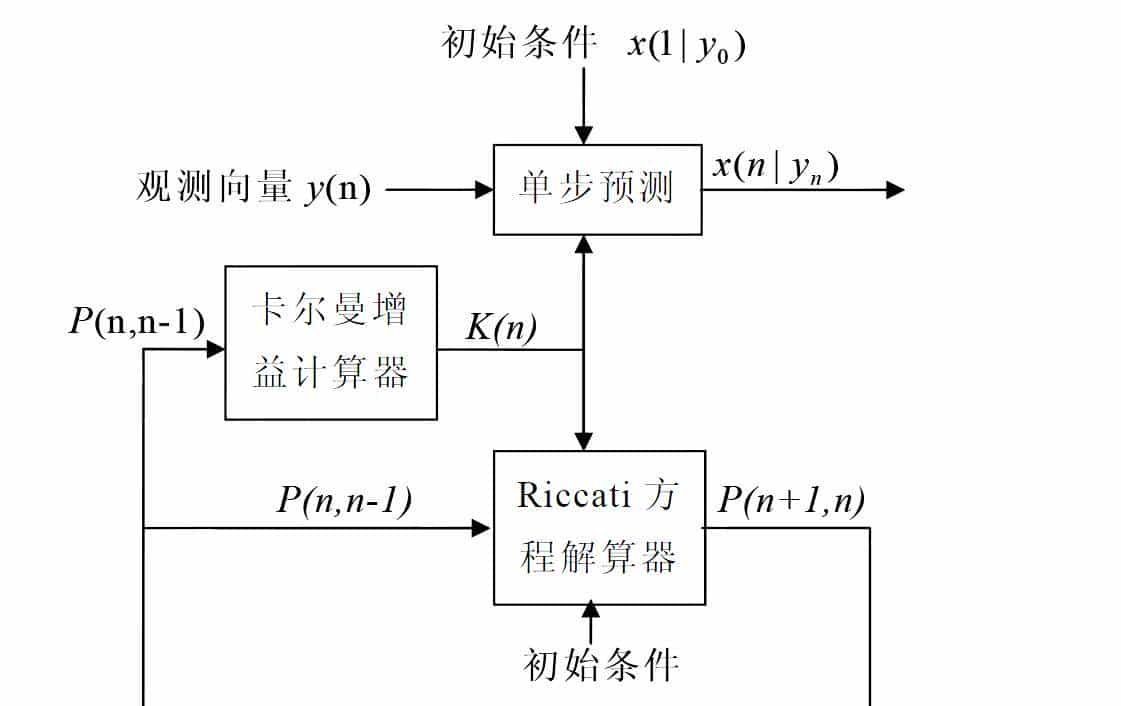
基于一步预测的卡尔曼滤波器求解
单步预测器方程:

α (n)为新息,即观测值与单步预测值之差:

卡尔曼滤波器增益K(n):

Riccati 方程用来迭代求解预测状态误差相关矩阵 P(n,n −1):

由上式推导得到新息过程α (n)的协方差估计 P (n) r 与状态误差相关矩阵P(n,n-1)的关系为:

因此,在给定初始条件 P(1,0)和 x(1| y0))后,以观测向量y(n)为输入,对方程进行递推计算,得到状态的最优统计估计值。
【说实话理解卡尔曼滤波就上面这么点文字远远不够,如果您坚持看到这里,给您点赞。情绪不错,请继续保持,我们接下来的文章尽量用人话解释,稍后会发一篇讲解卡尔曼滤波不错的一个视频,请关注】
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章











通俗易懂,小编挺你
请问完整版是什么?