
随着人工智能与智能制造的快速发展,机器人技术已渗透到工业生产、智能家居、自动驾驶、无人机巡检等多个领域,而算法作为机器人的 “大脑”,是决定其性能与功能的核心。不过,机器人算法涉及定位、映射、路径规划、运动控制等多个复杂模块,多数初学者面临 “理论难懂、代码难寻、实践门槛高” 的困境 —— 要么找不到贴近理论的实用代码,要么代码依赖复杂、可读性差,难以将书本知识转化为实际操作。
为解决这一困境,开源项目 PythonRobotics 应运而生。它不仅是一个机器人算法的 Python 代码集合,更是一本 “可运行的机器人算法教科书”,将复杂的机器人理论转化为简洁、易读的代码实例,覆盖从基础定位到高阶 SLAM 的全流程算法。无论是机器人专业学生、初入行业的开发者,还是需要快速验证算法的科研人员,都能通过该项目降低学习与开发成本,加速机器人技术的落地与创新。
简介
PythonRobotics 由开发者 AtsushiSakai 创建并维护,开源仓库位于 GitHub(
https://github.com/AtsushiSakai/PythonRobotics),采用 MIT 开源许可证,是 GitHub 机器人领域最受欢迎的开源项目之一。
PythonRobotics 项目的核心特点可概括为三点:
- 一是 “易读性优先”,所有代码均采用简洁的 Python 语法,避免复杂封装,每个算法的核心逻辑都有清晰注释,初学者能快速理解代码与理论的对应关系;
- 二是 “低依赖轻量化”,运行基础代码仅需 Python 3.13、NumPy、SciPy、Matplotlib 等常用库,无需安装昂贵的商业软件或复杂的机器人仿真环境,仅需普通电脑即可运行;
- 三是 “算法实用性强”,所选算法均为工业界与学术界广泛应用的经典方案,如路径规划中的 A*、D* Lite,定位中的粒子滤波,SLAM 中的 FastSLAM 等,可直接用于原型开发或二次修改。
PythonRobotics 的受众极为广泛:对学生而言,它是 “理论联系实际” 的最佳工具 —— 通过运行代码动画,能直观看到卡尔曼滤波如何修正定位误差、RRT* 如何避开障碍物规划路径,让抽象的公式变得具象;对工程师而言,它是 “快速验证想法” 的利器 —— 若需为自动驾驶小车设计路径跟踪算法,可直接基于项目中的 Stanley 控制代码修改参数,无需从零编写;对科研人员而言,项目提供的标准化代码框架(如 SLAM、机械臂控制)可作为对比实验的基准,减少重复开发工作量。
使用
PythonRobotics 的使用流程简洁明了,即使是 Python 初学者也能在 30 分钟内完成部署与首个算法运行。第一需将 GitHub 仓库中的代码克隆到本地,打开电脑的 “命令提示符”(Windows)或 “终端”(Linux/macOS),进入想要存放项目的目录,输入克隆命令:git clone
https://github.com/AtsushiSakai/PythonRobotics.git。
完成项目拉取后,进行依赖安装。推荐使用 conda 安装,避免版本冲突,创建专用环境:conda env create -f
requirements/environment.yml,该命令会自动读取 environment.yml 文件中的依赖配置,创建名为 “python-robotics” 的虚拟环境,并安装 NumPy、SciPy、Matplotlib、cvxpy 等运行依赖;安装完成后,输入conda activate python-robotics激活环境。也可以使用 pip 安装,执行 pip install -r
requirements/requirements.txt;若需安装开发依赖(如测试用的 pytest、文档生成用的 sphinx),可额外输入:pip install -r
requirements/dev-requirements.txt。
项目每个核心目录下都有多个算法示例,代码文件以 “算法名称.py” 命名(如particle_filter.py、a_star.py)。以下选择 “定位→路径规划→路径跟踪” 的经典流程,以 3 个代表性示例讲解运行方法,协助用户快速上手:
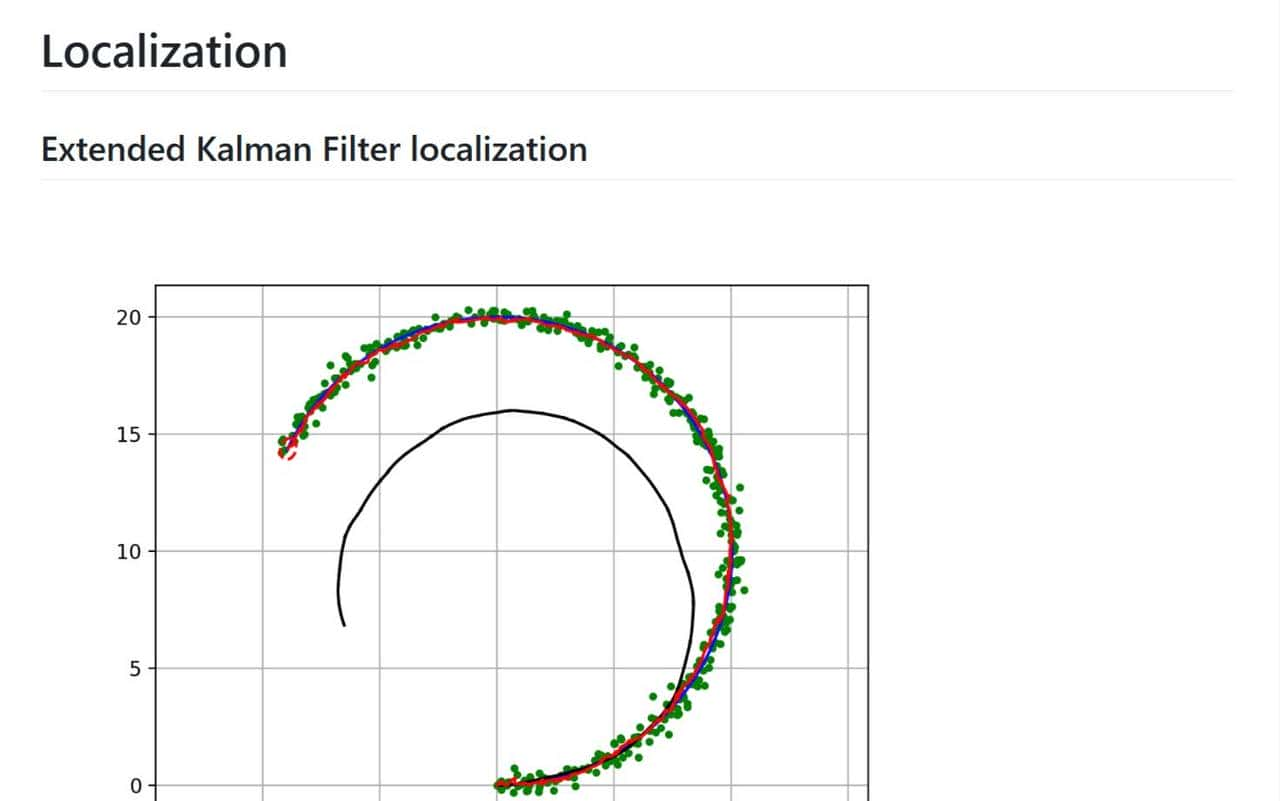
示例 1:Localization(粒子滤波定位)—— 理解机器人如何确定自身位置
粒子滤波是机器人定位的经典算法,可通过传感器数据(如 RFID 测距)修正 “航迹推算” 的误差,项目中
Localization/particle_filter.py是其核心示例。
- 在激活的 Python 环境中,进入粒子滤波目录:cd Localization;
- 输入运行命令:python particle_filter.py,按下回车后,会弹出一个动态窗口,展示粒子滤波的定位过程;
- 结果解读:窗口中蓝色线为机器人 “真实轨迹”,黑色线为 “航迹推算轨迹”(仅依赖运动指令,误差会逐渐累积),红色线为 “粒子滤波估计轨迹”,蓝色小点为 “粒子”(代表算法对机器人位置的猜测)。随着仿真推进,粒子会逐渐向真实轨迹聚集,红色线与蓝色线重合度越来越高,直观体现了粒子滤波通过传感器数据修正误差的原理。若想关闭仿真,直接关闭动态窗口即可。
示例 2:PathPlanning(A* 算法)—— 理解机器人如何规划最短路径
A* 算法是路径规划的 “标杆算法”,通过 “当前代价 + 启发式代价” 快速找到起点到终点的最短路径,项目中
PathPlanning/A_Star/a_star.py是实则现。
- 返回项目根目录:cd ..(从 Localization 目录退回),再进入 A * 算法目录:cd PathPlanning/A_Star;
- 输入运行命令:python a_star.py,弹出的动态窗口会展示 A * 算法的搜索与规划过程;
- 结果解读:窗口中绿色方块为 “起点”,红色方块为 “终点”,黑色区域为 “障碍物”,青色小点为 “正在搜索的节点”,最终生成的红色实线为 “最短路径”。算法会优先搜索 “当前代价 + 到终点的欧几里得距离(启发式)” 最小的节点,相比 Dijkstra 算法更高效,适合机器人在已知环境中快速规划路径。若想修改地图(如增加障碍物),可打开a_star.py,在 “map” 变量中调整 0(可通行)与 1(障碍物)的分布。
示例 3:PathTracking(Stanley 控制)—— 理解机器人如何跟踪预设路径
Stanley 控制是自动驾驶小车常用的路径跟踪算法,能通过调整转向角,让机器人沿预设路径行驶,项目中
PathTracking/stanley_control/stanley_control.py是其示例。
- 返回项目根目录:cd ../../(从 A_Star 目录退回),进入 Stanley 控制目录:cd PathTracking/stanley_control;
- 输入运行命令:python stanley_control.py,动态窗口会展示小车跟踪 “S 型路径” 的过程;
- 结果解读:窗口中黑色实线为 “预设路径”,蓝色矩形为 “机器人小车”,窗口顶部会显示实时速度(如 “Speed [km/h]:3.00”)。仿真中,小车会根据自身位置与路径的偏差,自动调整转向角,始终保持在路径附近行驶,即使遇到路径弯曲也能平稳跟踪。若想调整速度,可修改代码中 “target_speed” 变量的值(单位:km/h)。
总结
PythonRobotics 作为机器人领域的开源项目,以 “代码 + 教科书” 的双重形式,构建了覆盖机器人核心技术的完整生态。项目内容涵盖:定位(卡尔曼滤波、粒子滤波)、地图构建(激光雷达建图、高斯网格地图)、SLAM(ICP 匹配、FastSLAM)、路径规划(A*、RRT*、粒子群优化)、路径跟踪(Stanley 控制、LQR 控制)、专项应用(机械臂导航、无人机轨迹、双足机器人)等模块,基本覆盖从 “机器人感知环境” 到 “执行运动” 的全流程需求。项目代码注释清晰、依赖轻量化,既适合初学者 “边运行边理解”,也适合开发者 “拿过来就用”,避免了开源项目常见的 “代码过时、文档缺失” 问题。
PythonRobotics 不仅是 “学习工具”,更是 “生产力工具”:对学生而言,它将抽象的机器人理论转化为可交互的动画,解决了 “学了公式不会用” 的痛点,协助快速入门;对工程师而言,它提供了经过验证的算法模板,如无人机轨迹跟踪、机械臂避障等代码,可直接用于原型开发,缩短项目周期;对科研人员而言,项目的标准化代码框架可作为算法对比的基准,减少重复开发工作量。无论是想入门机器人技术的新手,还是需要快速验证算法的从业者,PythonRobotics 都是一个值得收藏并深入研究的开源项目。
© 版权声明
文章版权归作者所有,未经允许请勿转载。












点赞收藏