Ubuntu ROS2安装-RVIZ2、Gazebo
安装RVIZ2安装Moveit2安装Gezebo(Ignition/sim)更新源+安装基础工具安装默认的 Gazebo/ROS 配对测试报错libEGL warning: egl: failed to create dri2 screen注意:Igniton Gazebo和Gazebo Sim是不同的软件
安装Gazebo11(classic)官网安装方法Default installation: one-linerAlternative installation: step-by-stepInstalling gazebo_ros_pkgs (ROS 2)
网上安装方法添加PPA:更新软件包列表:安装gazebo11:查看版本再装 ROS 桥接安装ROS2 Control
其他参考一键安装 Gazebo Classic 11(Ubuntu 22.04)ubuntu20.04 版本安装gazebo11ubuntu22.04 版本安装gazebo11
安装RVIZ2
先打开终端,测试是否已安装rviz2:
rviz2
若可以打开rviz界面,则说明已安装。
安装ROS 2 Humble桌面版时已包含了RViz 2。
sudo apt install ros-humble-rviz2
安装Moveit2
sudo apt install ros-humble-moveit-*
source /opt/ros/humble/setup.bash
sudo apt install ros-humble-moveit-* 会把 MoveIt 2 在 Humble 下的全部功能包一次性装进系统,包括:
moveit_core / moveit_ros – 核心规划框架
moveit_planners_ompl / chomp / stomp – 官方规划器插件
moveit_plugins – 控制器、感知、轨迹执行插件
moveit_setup_assistant – GUI 配置向导
moveit_msgs / moveit_configs_utils – 消息与配置工具
moveit_servo / moveit_py / moveit_visual_tools – 实时伺服、Python 绑定、可视化辅助
sudo apt install ros-humble-controller-manager -y
sudo apt install ros-humble-joint-trajectory-controller ros-humble-joint-state-broadcaster -y
sudo apt install ros-humble-ros2-control
sudo apt install ros-humble-ros2-controllers
安装Gezebo(Ignition/sim)
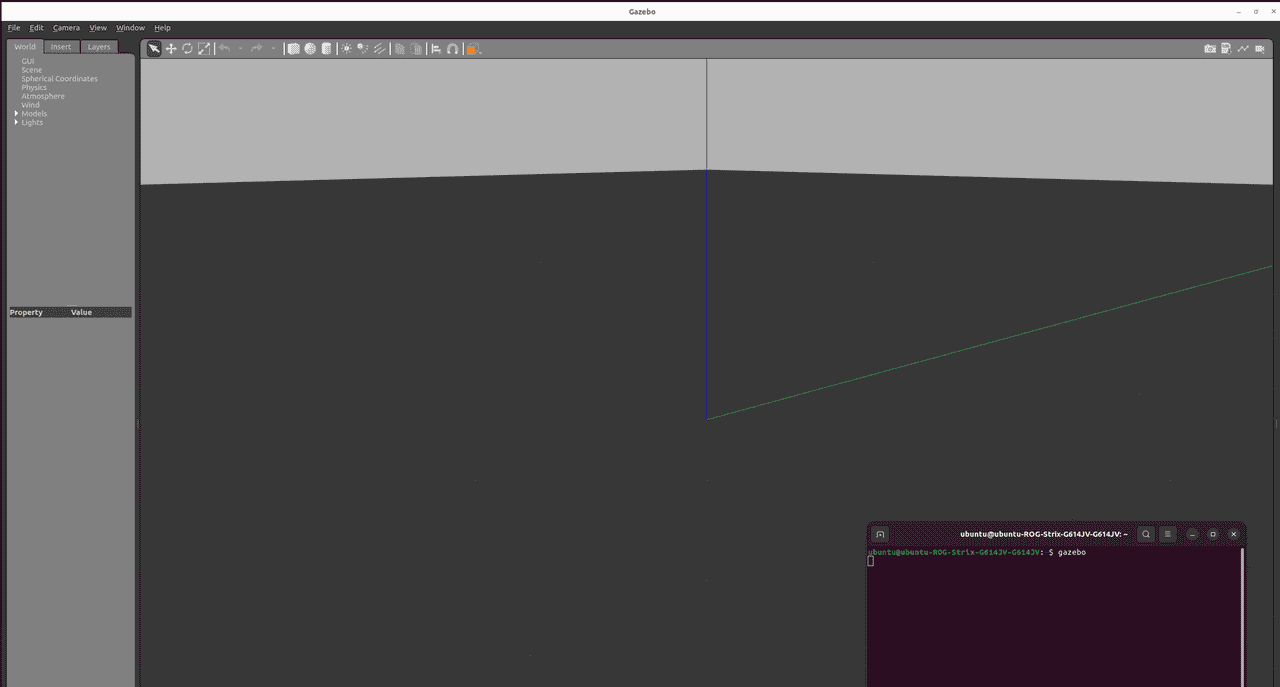
先打开终端,测试是否已安装gazebo:
gazebo
若可以打开gazebo界面,则说明已安装。
Gezebo官网
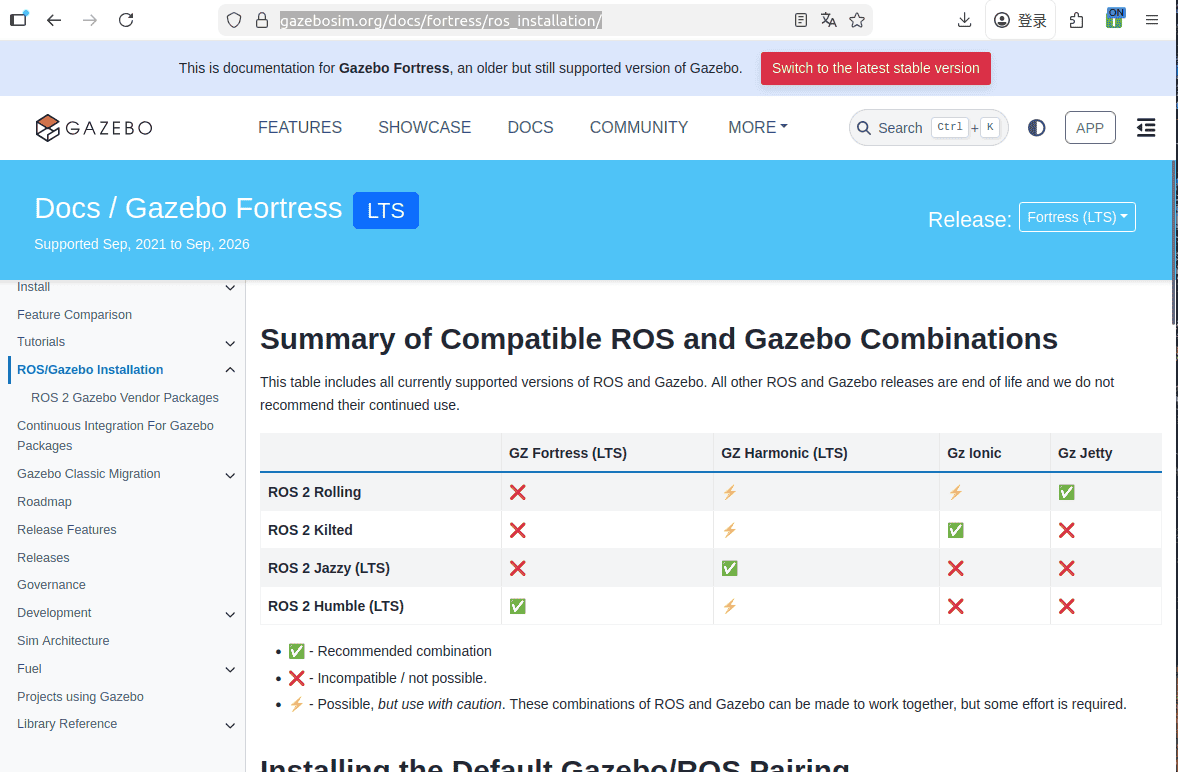
本系统为ROS2 humble,所以选择GZ Fortress。
更新源+安装基础工具
sudo apt-get update
sudo apt-get install lsb-release wget gnupg
安装默认的 Gazebo/ROS 配对
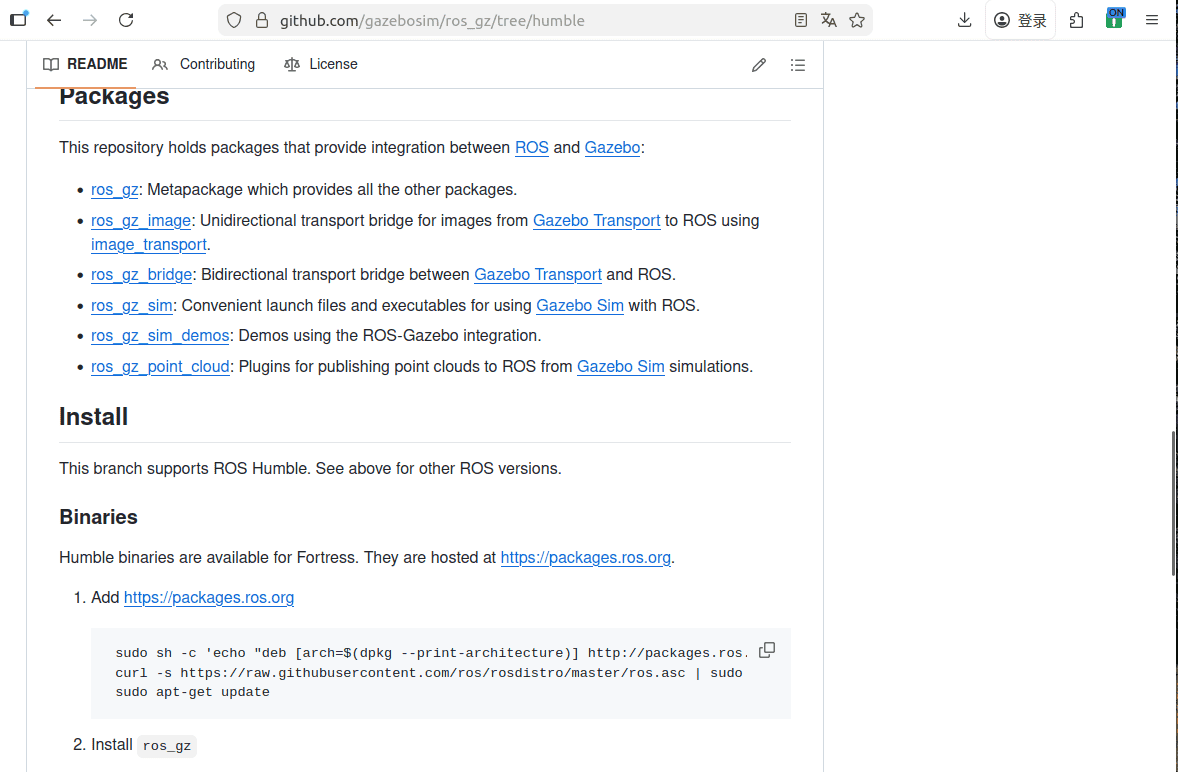
下命令将安装正确的 Gazebo 版本 ros_gz用于在Linux系统上安装ROS。你应该更换 ${ROS_DISTRO}使用您的ROS分布(例如humble,rolling,noetic等)。
# Add https://packages.ros.org
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt-get update
# Install ros_gz
sudo apt-get install ros-${ROS_DISTRO}-ros-gz
Github地址
注意:执行sudo apt install ros-humble-ros-gz
会自动拉取 Fortress 版本的 Gazebo 以及所有 ROS↔Gazebo 桥接包,无需再手动 sudo apt install ignition-fortress.
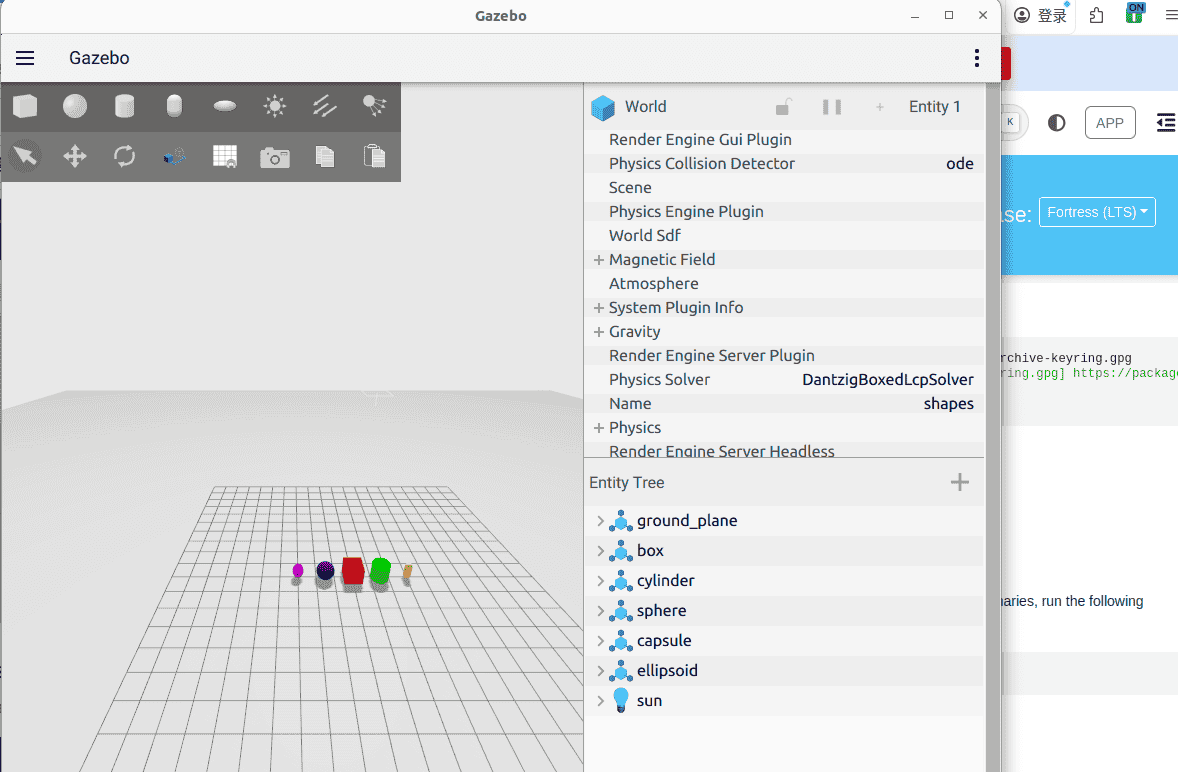
测试
gz sim shapes.sdf # Fortress uses "ign gazebo" instead of "gz sim"
# Add the -v 4 command line argument to generate error, warning, informational, and debugging messages on the console.
gz sim shapes.sdf -v 4 # Fortress uses "ign gazebo" instead of "gz sim"
报错libEGL warning: egl: failed to create dri2 screen
尚未被解决。。。。
注意:Igniton Gazebo和Gazebo Sim是不同的软件
这是Igniton Gazebo的图标

这是Gazebo Sim的图标
安装Gazebo11(classic)
先打开终端,测试是否已安装gazebo:
gazebo
若可以打开gazebo界面,则说明已安装。
官网安装方法
地址
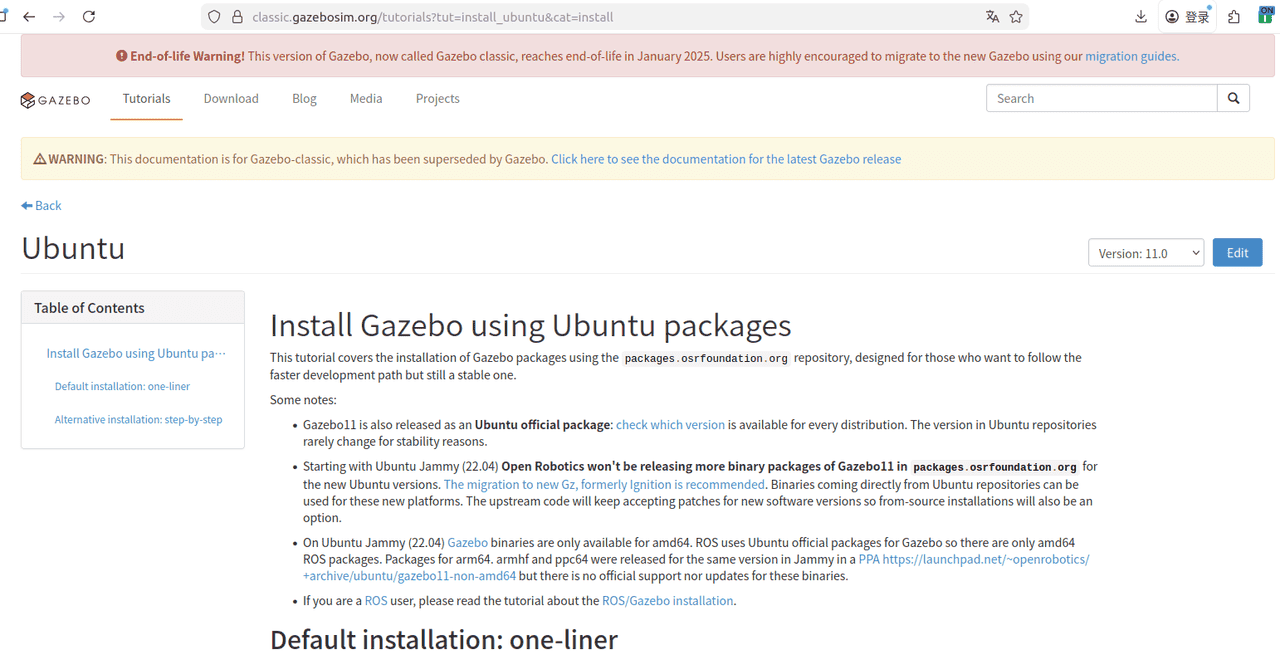
Default installation: one-liner
Install
curl -sSL http://get.gazebosim.org | sh
Run
gazebo
Alternative installation: step-by-step
Setup your computer to accept software from packages.osrfoundation.org.
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
You can check to see if the file was written correctly. For example, in Ubuntu Bionic (18.04), you can type:
cat /etc/apt/sources.list.d/gazebo-stable.list
And if everything is correct, you should see:
deb http://packages.osrfoundation.org/gazebo/ubuntu-stable bionic main
Setup keys
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
Install Gazebo.
First update the debian database:
sudo apt-get update
Hint: make sure the apt-get update process ends without any errors, the console output ends in Done similar to below:
$ sudo apt-get update
...
Hit http://ppa.launchpad.net bionic/main Translation-en
Ign http://us.archive.ubuntu.com bionic/main Translation-en_US
Ign http://us.archive.ubuntu.com bionic/multiverse Translation-en_US
Ign http://us.archive.ubuntu.com bionic/restricted Translation-en_US
Ign http://us.archive.ubuntu.com bionic/universe Translation-en_US
Reading package lists... Done
Next install gazebo-11 by:
sudo apt-get install gazebo11
# For developers that work on top of Gazebo, one extra package
sudo apt-get install libgazebo11-dev
Check your installation
gazebo
Installing gazebo_ros_pkgs (ROS 2)
地址
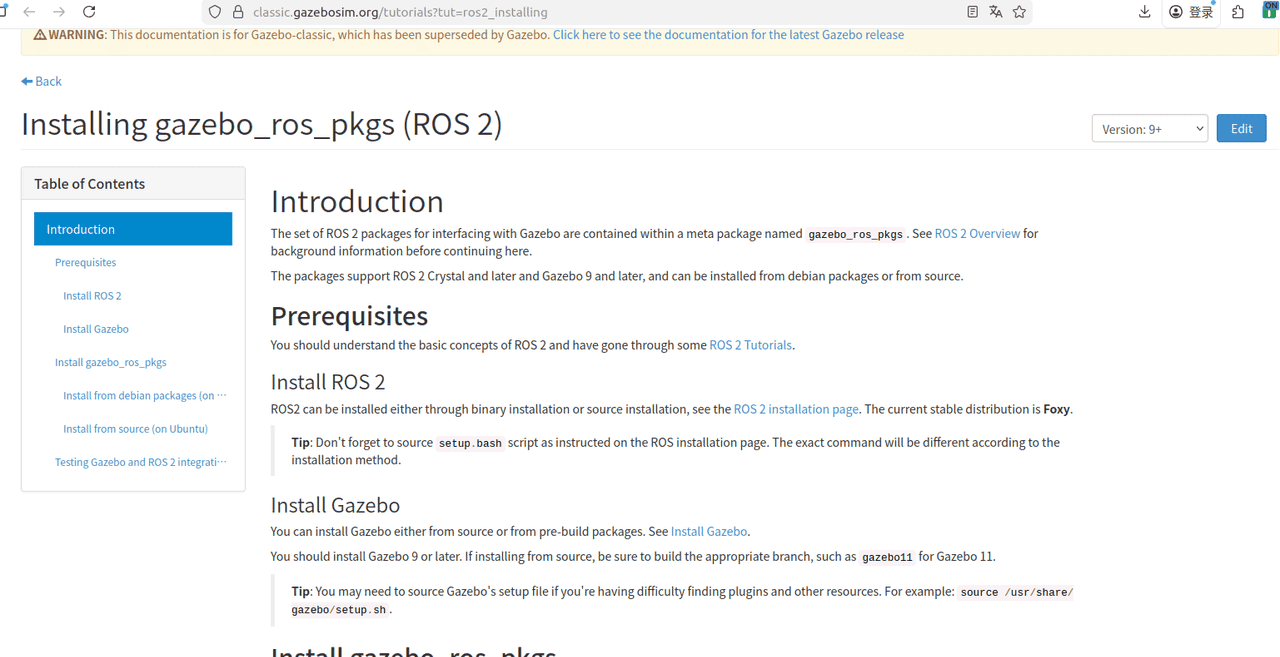
Install from debian packages (on Ubuntu):
sudo apt install ros-foxy-gazebo-ros-pkgs
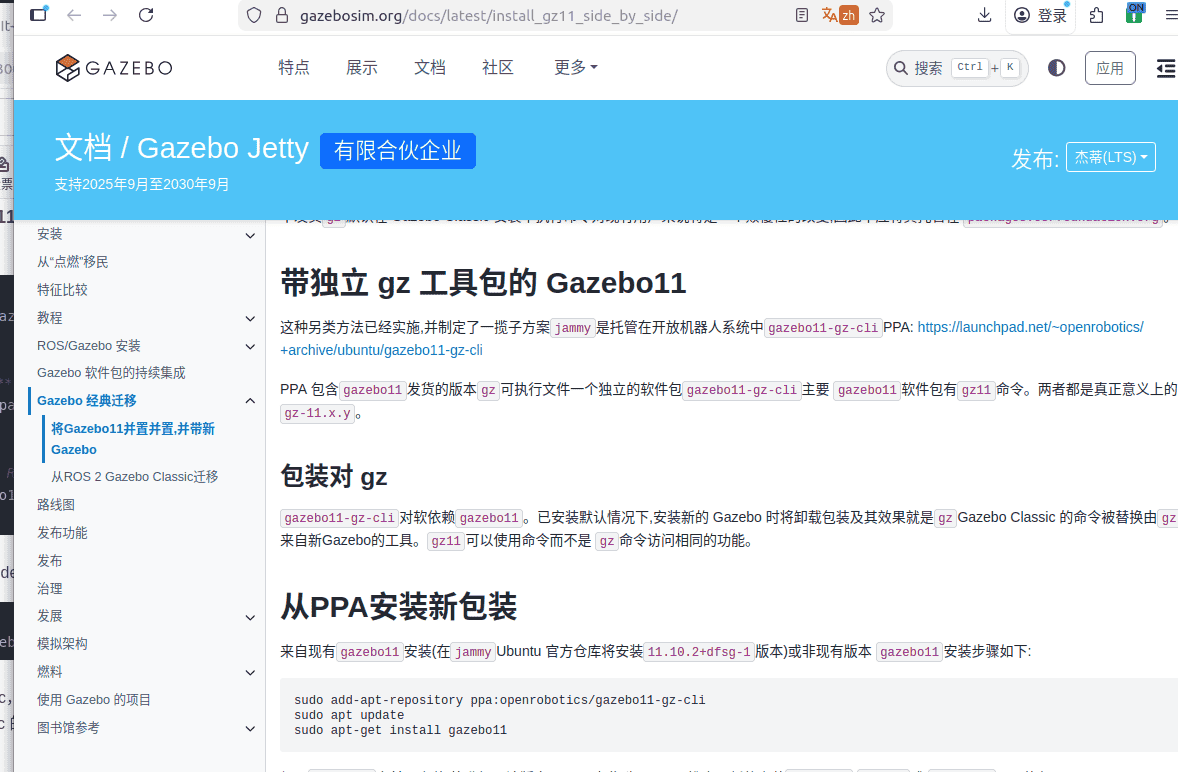
网上安装方法
添加PPA:
添加提供非amd64架构Gazebo 11软件包的PPA:
sudo add-apt-repository ppa:openrobotics/gazebo11-gz-cli
更新软件包列表:
sudo apt-get update
安装gazebo11:
sudo apt install gazebo11 libgazebo11-dev
查看版本
gazebo --version
再装 ROS 桥接
sudo apt install ros-humble-gazebo-ros-pkgs ros-humble-gazebo-plugins
安装ROS2 Control
sudo apt-get install ros-${ROS_DISTRO}-ros2-control ros-${ROS_DISTRO}-ros2-controllers ros-${ROS_DISTRO}-gripper-controllers ros-${ROS_DISTRO}-gazebo-ros2-control
sudo apt install ros-humble-gazebo-ros2-control
sudo apt install ros-humble-gazebo-ros2-control 就是专为 Gazebo Classic(gazebo11) 设计的 ROS 2 控制插件包,它:
仅与 Gazebo 11 配合工作,提供 libgazebo_ros2_control.so 插件负责把 URDF 中 gazebo_ros2_control/GazeboSystem 加载到 Gazebo Classic,并暴露 controller_manager 服务不包含任何 Ignition/Fortress 组件;若误装 Fortress 会立即段错误(exit -11)
其他参考
一键安装 Gazebo Classic 11(Ubuntu 22.04)
# 1. 清理残留
sudo apt remove --purge gazebo* libgazebo* 2>/dev/null
sudo apt autoremove -y
# 2. 添加 **新版 Gazebo 11** 专用 PPA
sudo add-apt-repository ppa:openrobotics/gazebo11-gz-cli
sudo apt update
# 3. 安装本体 + 开发头文件 + ROS 2 桥接
sudo apt install -y gazebo11 libgazebo11-dev ros-humble-gazebo-ros-pkgs
如果仍提示依赖缺失,用 aptitude 自动解依赖:
sudo apt install aptitude
sudo aptitude install gazebo11 libgazebo11-dev
若你同时装有 Ignition/Harmonic,gazebo11-gz-cli 会避免命令冲突,Gazebo Classic 的命令是 gz11 而不是 gz。
网址
ubuntu20.04 版本安装gazebo11
(1)安装Gazebo:在安装ROS后,可以通过以下命令安装Gazebo仿真平台:
sudo apt-get install gazebo11
(2)安装ROS控制器包:为了使用Gazebo仿真平台中的控制器,需要安装ROS控制器包。可以通过以下命令进行安装(将Noetic替换为自己的Ros版本):
sudo apt-get install ros-Noetic-ros-control ros-Noetic-ros-controllers
(3)安装Gazebo的Ros插件(这里以Noetic为例子),这个根据用的ros版本修改。。
sudo apt install ros-Noetic-gazebo-*
(4)验证安装。
apt search ros-Noetic-gazebo | grep gazebo-ros
ubuntu22.04 版本安装gazebo11
(1)添加PPA。 添加提供非amd64架构Gazebo 11软件包(对应ubuntu22.04)的PPA:
sudo add-apt-repository ppa:openrobotics/gazebo11-gz-cli
(2)更新软件包列表:
sudo apt-get update
(3)装Gazebo:在安装ROS后,可以通过以下命令安装Gazebo仿真平台:
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
(4)安装Gazebo的Ros插件。
sudo apt install ros-humble-gazebo-ros
(5)安装完整 Gazebo 集成(可选)。
sudo apt install ros-humble-gazebo-ros-pkgs
这会安装:ros-humble-gazebo-rosros-humble-gazebo-ros2-controlros-humble-gazebo-dev等依赖包
(6)验证安装。
apt search ros-humble-gazebo | grep gazebo-ros
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...