
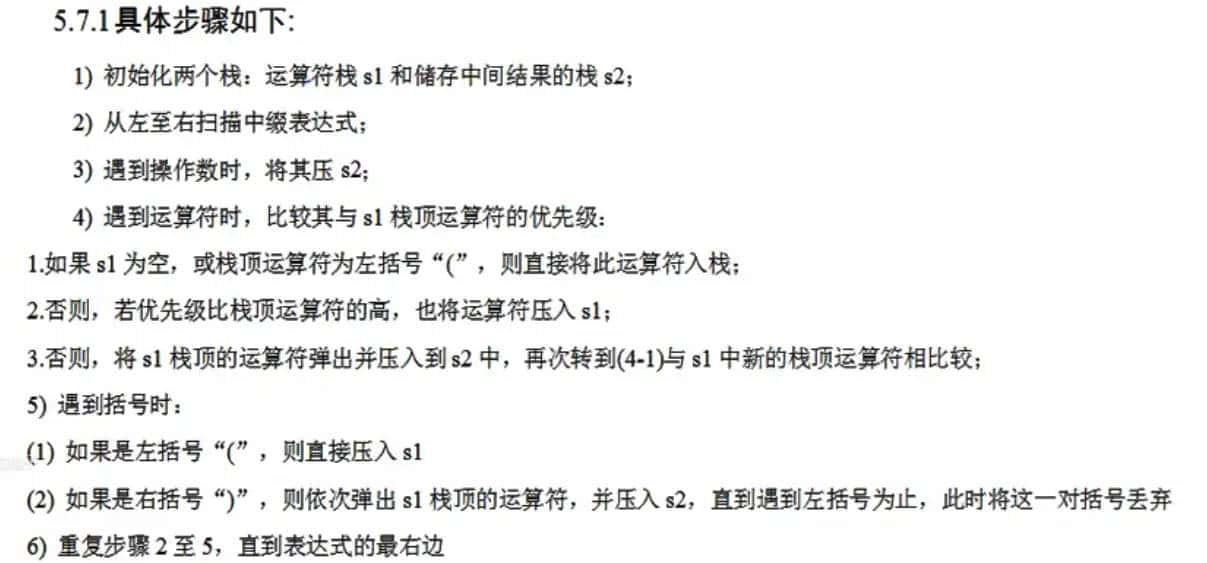
14.5.3 任务调度
任务调度是操作系统核心功能,负责在多个任务间分配处理器时间,确保系统高效运行并满足不同应用的需求。
c
#include <stdio.h>
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
#include <stdlib.h>
#include <time.h>
// 任务状态枚举
typedef enum {
TASK_READY, // 就绪,可以执行
TASK_RUNNING, // 正在执行
TASK_BLOCKED, // 被阻塞 (等待I/O或其他资源)
TASK_SUSPENDED, // 被挂起 (由用户或调试器暂停)
TASK_TERMINATED // 已终止
} TaskState;
// 任务优先级
typedef enum {
PRIORITY_IDLE = 0, // 空闲任务
PRIORITY_LOW = 1, // 低优先级
PRIORITY_NORMAL = 2, // 普通优先级
PRIORITY_HIGH = 3, // 高优先级
PRIORITY_REALTIME = 4 // 实时优先级
} TaskPriority;
// 简化的任务控制块结构
typedef struct Task {
uint32_t id; // 任务ID
char name[32]; // 任务名称
TaskState state; // 任务状态
TaskPriority basePriority; // 基本优先级
TaskPriority dynPriority; // 动态优先级 (可能被调度器调整)
uint32_t timeSlice; // 分配的时间片 (毫秒)
uint32_t timeRemaining; // 剩余时间片
uint32_t executionTime; // 已执行时间
uint32_t waitTime; // 等待时间
// 上下文信息 (实际系统中会包含寄存器值等)
uint32_t stackPointer; // 栈指针
uint32_t instructionPointer;// 指令指针
uint32_t pageDirectoryBase; // 页目录基址 (CR3)
bool isKernelTask; // 是否是内核任务
uint32_t lastScheduleTime; // 上次被调度的时间
uint32_t wakeUpTime; // 如果被阻塞,何时唤醒
struct Task* next; // 链表中的下一个任务
} Task;
// 调度算法类型
typedef enum {
SCHED_ROUND_ROBIN, // 轮转调度
SCHED_PRIORITY, // 优先级调度
SCHED_MULTILEVEL_FEEDBACK // 多级反馈队列
} SchedulerType;
// 多级反馈队列的队列数量
#define MAX_PRIORITY_QUEUES 5
// 调度器状态结构
typedef struct {
Task* runningTask; // 当前运行的任务
Task* readyQueues[MAX_PRIORITY_QUEUES]; // 多级就绪队列
Task* blockedQueue; // 阻塞队列
SchedulerType algorithm; // 当前调度算法
uint32_t systemTime; // 系统时间 (毫秒)
uint32_t timesliceQuantum; // 基本时间片大小
uint32_t taskSwitches; // 任务切换次数
bool preemptionEnabled; // 是否启用抢占
} Scheduler;
// 初始化任务
Task* createTask(uint32_t id, const char* name, TaskPriority priority, bool isKernel) {
Task* task = (Task*)malloc(sizeof(Task));
if (!task) return NULL;
memset(task, 0, sizeof(Task));
task->id = id;
strncpy(task->name, name, sizeof(task->name) - 1);
task->state = TASK_READY;
task->basePriority = priority;
task->dynPriority = priority;
// 根据优先级分配时间片
switch(priority) {
case PRIORITY_IDLE:
task->timeSlice = 10; // 最小时间片
break;
case PRIORITY_LOW:
task->timeSlice = 30;
break;
case PRIORITY_NORMAL:
task->timeSlice = 50;
break;
case PRIORITY_HIGH:
task->timeSlice = 80;
break;
case PRIORITY_REALTIME:
task->timeSlice = 100; // 最大时间片
break;
}
task->timeRemaining = task->timeSlice;
task->isKernelTask = isKernel;
// 模拟地址信息
task->stackPointer = 0xC0000000 - id * 0x10000;
task->instructionPointer = isKernel ? 0x80010000 + id * 0x1000 : 0x00401000 + id * 0x1000;
task->pageDirectoryBase = isKernel ? 0x00100000 : 0x00200000 + id * 0x1000;
task->next = NULL;
return task;
}
// 初始化调度器
void initScheduler(Scheduler* scheduler, SchedulerType algorithm) {
memset(scheduler, 0, sizeof(Scheduler));
scheduler->algorithm = algorithm;
scheduler->timesliceQuantum = 50; // 默认时间片大小(毫秒)
scheduler->preemptionEnabled = true;
}
// 向就绪队列添加任务
void addTaskToReadyQueue(Scheduler* scheduler, Task* task) {
if (!task) return;
// 确保优先级在有效范围内
int priority = task->dynPriority;
if (priority < 0) priority = 0;
if (priority >= MAX_PRIORITY_QUEUES) priority = MAX_PRIORITY_QUEUES - 1;
task->state = TASK_READY;
task->timeRemaining = task->timeSlice;
// 加入对应优先级的就绪队列
if (scheduler->readyQueues[priority] == NULL) {
scheduler->readyQueues[priority] = task;
task->next = NULL;
} else {
// 加入队列尾部
Task* current = scheduler->readyQueues[priority];
while (current->next != NULL) {
current = current->next;
}
current->next = task;
task->next = NULL;
}
}
// 向阻塞队列添加任务
void addTaskToBlockedQueue(Scheduler* scheduler, Task* task, uint32_t wakeupTime) {
if (!task) return;
task->state = TASK_BLOCKED;
task->wakeUpTime = wakeupTime;
// 加入阻塞队列 (按唤醒时间排序)
if (scheduler->blockedQueue == NULL) {
scheduler->blockedQueue = task;
task->next = NULL;
} else if (task->wakeUpTime < scheduler->blockedQueue->wakeUpTime) {
// 插入队列头部
task->next = scheduler->blockedQueue;
scheduler->blockedQueue = task;
} else {
// 按唤醒时间顺序插入
Task* current = scheduler->blockedQueue;
while (current->next != NULL && current->next->wakeUpTime <= task->wakeUpTime) {
current = current->next;
}
task->next = current->next;
current->next = task;
}
}
// 从就绪队列中获取下一个任务 (基于当前调度算法)
Task* getNextReadyTask(Scheduler* scheduler) {
Task* nextTask = NULL;
switch (scheduler->algorithm) {
case SCHED_ROUND_ROBIN:
// 简单轮转:从最高优先级队列开始寻找就绪任务
for (int i = MAX_PRIORITY_QUEUES - 1; i >= 0; i--) {
if (scheduler->readyQueues[i] != NULL) {
nextTask = scheduler->readyQueues[i];
scheduler->readyQueues[i] = nextTask->next;
nextTask->next = NULL;
break;
}
}
break;
case SCHED_PRIORITY:
// 优先级调度:总是选择最高优先级的队列
for (int i = MAX_PRIORITY_QUEUES - 1; i >= 0; i--) {
if (scheduler->readyQueues[i] != NULL) {
nextTask = scheduler->readyQueues[i];
scheduler->readyQueues[i] = nextTask->next;
nextTask->next = NULL;
break;
}
}
break;
case SCHED_MULTILEVEL_FEEDBACK:
// 多级反馈队列:从高优先级队列开始,但有老化机制
// 这里简化实现:仍然从最高优先级队列选择任务
for (int i = MAX_PRIORITY_QUEUES - 1; i >= 0; i--) {
if (scheduler->readyQueues[i] != NULL) {
nextTask = scheduler->readyQueues[i];
scheduler->readyQueues[i] = nextTask->next;
nextTask->next = NULL;
// 多级反馈特性:用完时间片的任务降低优先级
if (nextTask->timeRemaining == 0) {
nextTask->dynPriority = (nextTask->dynPriority > 0) ?
nextTask->dynPriority - 1 : 0;
}
break;
}
}
break;
}
return nextTask;
}
// 检查阻塞队列,唤醒可以恢复的任务
void checkBlockedTasks(Scheduler* scheduler) {
Task* current = scheduler->blockedQueue;
Task* prev = NULL;
while (current != NULL) {
if (current->wakeUpTime <= scheduler->systemTime) {
// 从阻塞队列移除
if (prev == NULL) {
scheduler->blockedQueue = current->next;
} else {
prev->next = current->next;
}
Task* taskToWake = current;
current = current->next;
// 添加到就绪队列
taskToWake->next = NULL;
addTaskToReadyQueue(scheduler, taskToWake);
} else {
prev = current;
current = current->next;
}
}
}
// 执行任务切换
void switchToTask(Scheduler* scheduler, Task* newTask) {
if (!newTask) return;
// 保存当前任务状态(如果有)
if (scheduler->runningTask != NULL && scheduler->runningTask != newTask) {
scheduler->runningTask->lastScheduleTime = scheduler->systemTime;
// 如果当前任务仍处于运行态,将其放回就绪队列
if (scheduler->runningTask->state == TASK_RUNNING) {
scheduler->runningTask->state = TASK_READY;
addTaskToReadyQueue(scheduler, scheduler->runningTask);
}
}
// 切换到新任务
scheduler->runningTask = newTask;
newTask->state = TASK_RUNNING;
newTask->lastScheduleTime = scheduler->systemTime;
// 记录任务切换
scheduler->taskSwitches++;
// 在实际系统中,这里会执行上下文切换代码
printf("切换到任务: %s (ID=%u, 优先级=%d)
",
newTask->name, newTask->id, newTask->dynPriority);
}
// 时间片用尽时的处理
void handleTimesliceExpired(Scheduler* scheduler) {
if (!scheduler->runningTask) return;
Task* currentTask = scheduler->runningTask;
// 根据调度算法执行不同操作
switch (scheduler->algorithm) {
case SCHED_ROUND_ROBIN:
// 轮转:简单地将任务放回就绪队列
addTaskToReadyQueue(scheduler, currentTask);
break;
case SCHED_PRIORITY:
// 优先级调度:仍然按优先级放回就绪队列
addTaskToReadyQueue(scheduler, currentTask);
break;
case SCHED_MULTILEVEL_FEEDBACK:
// 多级反馈队列:降低用完时间片任务的优先级
if (currentTask->dynPriority > 0) {
currentTask->dynPriority--;
}
addTaskToReadyQueue(scheduler, currentTask);
break;
}
// 重新调度
Task* nextTask = getNextReadyTask(scheduler);
if (nextTask) {
switchToTask(scheduler, nextTask);
} else {
// 无可用任务,保持当前任务运行
scheduler->runningTask->timeRemaining = scheduler->runningTask->timeSlice;
}
}
// 系统时钟中断处理 (模拟时钟中断处理程序)
void handleClockInterrupt(Scheduler* scheduler) {
// 更新系统时间
scheduler->systemTime += 10; // 假设每次中断增加10ms
// 检查阻塞队列,唤醒到期的任务
checkBlockedTasks(scheduler);
// 如果没有正在运行的任务,选择一个
if (scheduler->runningTask == NULL) {
Task* nextTask = getNextReadyTask(scheduler);
if (nextTask) {
switchToTask(scheduler, nextTask);
}
return;
}
// 减少当前任务的剩余时间片
if (scheduler->runningTask->timeRemaining > 0) {
scheduler->runningTask->timeRemaining -= 10;
}
// 更新执行时间
scheduler->runningTask->executionTime += 10;
// 检查时间片是否用尽
if (scheduler->runningTask->timeRemaining <= 0) {
printf("任务 %s 的时间片用尽
", scheduler->runningTask->name);
handleTimesliceExpired(scheduler);
}
// 如果启用抢占,检查是否有更高优先级的任务就绪
else if (scheduler->preemptionEnabled) {
// 检查是否有更高优先级的任务
for (int i = MAX_PRIORITY_QUEUES - 1; i > scheduler->runningTask->dynPriority; i--) {
if (scheduler->readyQueues[i] != NULL) {
printf("抢占:有更高优先级的任务就绪
");
// 将当前任务放回就绪队列
addTaskToReadyQueue(scheduler, scheduler->runningTask);
// 切换到高优先级任务
Task* highPriorityTask = getNextReadyTask(scheduler);
switchToTask(scheduler, highPriorityTask);
break;
}
}
}
}
// 模拟I/O操作阻塞任务
void blockTaskForIO(Scheduler* scheduler, uint32_t duration) {
if (!scheduler->runningTask) return;
printf("任务 %s 因I/O操作阻塞 %u ms
",
scheduler->runningTask->name, duration);
Task* taskToBlock = scheduler->runningTask;
scheduler->runningTask = NULL;
// 计算唤醒时间
uint32_t wakeupTime = scheduler->systemTime + duration;
// 加入阻塞队列
addTaskToBlockedQueue(scheduler, taskToBlock, wakeupTime);
// 选择下一个任务运行
Task* nextTask = getNextReadyTask(scheduler);
if (nextTask) {
switchToTask(scheduler, nextTask);
}
}
// 显示就绪队列状态
void displayReadyQueues(Scheduler* scheduler) {
printf("
就绪队列状态:
");
printf("----------------
");
for (int i = MAX_PRIORITY_QUEUES - 1; i >= 0; i--) {
printf("优先级 %d: ", i);
if (scheduler->readyQueues[i] == NULL) {
printf("(空)
");
} else {
Task* task = scheduler->readyQueues[i];
while (task != NULL) {
printf("%s", task->name);
if (task->next != NULL) printf(" -> ");
task = task->next;
}
printf("
");
}
}
}
// 显示阻塞队列状态
void displayBlockedQueue(Scheduler* scheduler) {
printf("
阻塞队列状态:
");
printf("----------------
");
if (scheduler->blockedQueue == NULL) {
printf("(空)
");
} else {
Task* task = scheduler->blockedQueue;
printf("任务名称 唤醒时间 等待时间
");
while (task != NULL) {
printf("%-12s %6u ms %6u ms
",
task->name,
task->wakeUpTime,
task->wakeUpTime - scheduler->systemTime);
task = task->next;
}
}
}
// 显示当前运行任务状态
void displayRunningTask(Scheduler* scheduler) {
printf("
当前运行任务:
");
printf("----------------
");
if (scheduler->runningTask == NULL) {
printf("(无任务运行)
");
} else {
Task* task = scheduler->runningTask;
printf("名称: %s (ID=%u)
", task->name, task->id);
printf("优先级: %d (基本=%d, 动态=%d)
",
task->dynPriority, task->basePriority, task->dynPriority);
printf("时间片: 剩余=%u ms, 总计=%u ms
",
task->timeRemaining, task->timeSlice);
printf("执行时间: %u ms
", task->executionTime);
printf("上下文: SP=0x%08X, IP=0x%08X, CR3=0x%08X
",
task->stackPointer, task->instructionPointer, task->pageDirectoryBase);
}
}
// 显示调度器统计信息
void displaySchedulerStats(Scheduler* scheduler) {
printf("
调度器统计:
");
printf("----------------
");
printf("调度算法: ");
switch(scheduler->algorithm) {
case SCHED_ROUND_ROBIN: printf("轮转调度
"); break;
case SCHED_PRIORITY: printf("优先级调度
"); break;
case SCHED_MULTILEVEL_FEEDBACK: printf("多级反馈队列
"); break;
}
printf("系统时间: %u ms
", scheduler->systemTime);
printf("任务切换次数: %u
", scheduler->taskSwitches);
printf("抢占模式: %s
", scheduler->preemptionEnabled ? "启用" : "禁用");
}
// 演示不同调度算法的特性
void demonstrateSchedulerAlgorithms() {
printf("
调度算法比较:
");
printf("==================
");
printf("1. 轮转调度 (Round Robin):
");
printf(" - 为每个任务分配固定时间片
");
printf(" - 时间片用尽后,任务移到队列末尾
");
printf(" - 公平分配处理器时间
");
printf(" - 适用于分时系统
");
printf(" - 特点: 公平但不考虑任务优先级和行为
");
printf("2. 优先级调度 (Priority Scheduling):
");
printf(" - 总是选择最高优先级任务运行
");
printf(" - 同一优先级内可能使用轮转
");
printf(" - 可能导致低优先级任务饥饿
");
printf(" - 适用于有明确任务重要性区分的系统
");
printf(" - 特点: 响应重要任务快,但可能不公平
");
printf("3. 多级反馈队列 (Multilevel Feedback Queue):
");
printf(" - 结合前两种算法的优点
");
printf(" - 新任务初始分配高优先级
");
printf(" - 用完时间片的任务降低优先级
");
printf(" - I/O密集型任务倾向于保持较高优先级
");
printf(" - CPU密集型任务逐渐降至低优先级
");
printf(" - 特点: 适应性强,兼顾交互性和吞吐量
");
printf("4. 实时调度算法 (在一些实时操作系统中使用):
");
printf(" - 截止时间调度 (EDF): 优先执行最早截止时间的任务
");
printf(" - 速率单调调度 (RMS): 静态优先级基于任务周期
");
printf(" - 特点: 确保任务在截止时间前完成
");
}
// 展示实际操作系统中的调度器
void demonstrateRealOSSchedulers() {
printf("
实际操作系统中的调度器:
");
printf("=====================
");
printf("1. Linux调度器演进:
");
printf(" - O(n)调度器: 2.4内核及之前,简单优先级队列
");
printf(" - O(1)调度器: 2.6早期版本,常量时间复杂度
");
printf(" - CFS (完全公平调度): 2.6.23及之后
");
printf(" * 基于红黑树而非队列
");
printf(" * 按虚拟运行时间排序任务
");
printf(" * 目标是公平分配CPU时间
");
printf(" - 实时调度类: SCHED_FIFO和SCHED_RR用于实时任务
");
printf("2. Windows调度器:
");
printf(" - 基于32级优先级系统
");
printf(" - 0-15: 可变优先级 (普通应用程序)
");
printf(" - 16-31: 实时优先级
");
printf(" - 动态提升前台应用优先级
");
printf(" - 量子值根据系统配置调整
");
printf(" - 处理器组用于多处理器系统的负载均衡
");
printf("3. macOS/iOS调度器:
");
printf(" - 基于Mach微内核的调度
");
printf(" - 多级反馈队列的变种
");
printf(" - 任务优先级考虑用户交互
");
printf(" - 能效核心调度 (在异构处理器如M1上)
");
printf("4. 调度器考虑的关键因素:
");
printf(" - 缓存和TLB亲和性
");
printf(" - 电源管理和能效
");
printf(" - 多核负载均衡
");
printf(" - 公平性与响应性的平衡
");
printf(" - NUMA架构上的内存访问局部性
");
}
// 演示典型的多任务场景
void simulateMultitasking(SchedulerType algorithm) {
printf("
===== 模拟调度器: ");
switch(algorithm) {
case SCHED_ROUND_ROBIN: printf("轮转调度 =====
"); break;
case SCHED_PRIORITY: printf("优先级调度 =====
"); break;
case SCHED_MULTILEVEL_FEEDBACK: printf("多级反馈队列 =====
"); break;
}
// 初始化调度器
Scheduler scheduler;
initScheduler(&scheduler, algorithm);
// 创建一些任务
Task* tasks[6];
tasks[0] = createTask(1, "系统空闲", PRIORITY_IDLE, true);
tasks[1] = createTask(2, "系统服务", PRIORITY_HIGH, true);
tasks[2] = createTask(3, "用户界面", PRIORITY_NORMAL, false);
tasks[3] = createTask(4, "文件备份", PRIORITY_LOW, false);
tasks[4] = createTask(5, "视频播放", PRIORITY_NORMAL, false);
tasks[5] = createTask(6, "打印服务", PRIORITY_LOW, false);
// 将任务添加到就绪队列
for (int i = 0; i < 6; i++) {
addTaskToReadyQueue(&scheduler, tasks[i]);
}
// 显示初始状态
displayReadyQueues(&scheduler);
// 模拟一段时间的系统运行
printf("
开始模拟系统运行...
");
printf("====================
");
// 模拟一些时钟中断和任务行为
for (int tick = 0; tick < 30; tick++) {
printf("
[时刻 %d] 系统时间: %u ms
", tick + 1, scheduler.systemTime);
// 处理时钟中断
handleClockInterrupt(&scheduler);
// 随机模拟一些任务行为
if (scheduler.runningTask != NULL) {
int r = rand() % 20;
if (r == 0) {
// 模拟I/O操作
blockTaskForIO(&scheduler, 50 + rand() % 100);
}
}
// 每5个tick显示一次系统状态
if (tick % 5 == 4) {
displayRunningTask(&scheduler);
displayReadyQueues(&scheduler);
displayBlockedQueue(&scheduler);
displaySchedulerStats(&scheduler);
}
}
}
int main() {
printf("32位微处理器的任务调度
");
printf("=====================
");
printf("任务调度是操作系统核心功能,负责在多个任务间分配处理器时间,确保系统高效运行
");
printf("并满足不同应用的需求。
");
// 初始化随机数生成器
srand(time(NULL));
// 演示不同调度算法的特性
demonstrateSchedulerAlgorithms();
// 模拟使用不同调度算法的多任务场景
simulateMultitasking(SCHED_ROUND_ROBIN);
simulateMultitasking(SCHED_PRIORITY);
simulateMultitasking(SCHED_MULTILEVEL_FEEDBACK);
// 展示实际操作系统中的调度器
demonstrateRealOSSchedulers();
return 0;
}32位微处理器的任务调度是操作系统核心功能之一,负责决定在任何给定时刻哪个任务应该获得CPU时间,以及如何在多个任务之间分配处理器资源。有效的任务调度对系统性能、响应性和公平性至关重要。
任务调度的基础概念
任务(进程/线程):
每个任务由任务控制块(TCB)表示,包含:
任务标识符和状态信息寄存器值(上下文)内存管理信息(页表指针)调度参数(优先级、时间片)
任务状态:
就绪(Ready):可以执行,等待被调度运行(Running):当前正在CPU上执行阻塞(Blocked):等待某个事件(如I/O完成)挂起(Suspended):临时停止执行终止(Terminated):执行完成或被强制终止
调度器组件:
就绪队列:存放准备执行的任务阻塞队列:存放等待特定事件的任务调度算法:决定下一个执行任务的策略上下文切换:保存当前任务状态并恢复另一任务状态
主要调度算法
轮转调度(Round Robin):
为每个任务分配固定的时间片时间片用尽后,任务移至队列末尾特点:公平简单,但不考虑任务优先级和行为特性适用场景:分时系统,一般用户环境
优先级调度(Priority Scheduling):
每个任务分配优先级,高优先级任务优先执行同优先级内可能使用轮转方式特点:响应重要任务快,但可能导致低优先级任务”饥饿”适用场景:任务重要性差异明显的系统
多级反馈队列(Multilevel Feedback Queue):
结合前两种方法的优点多个优先级队列,每个队列可能有不同时间片新任务初始分配高优先级,用完时间片后降级特点:适应性强,自动平衡交互型和计算密集型任务适用场景:通用操作系统,如Windows、Unix
实时调度算法:
最早截止时间优先(EDF):选择最早截止时间的任务速率单调调度(RMS):基于任务周期设置静态优先级特点:确保任务在截止时间前完成适用场景:实时系统,如嵌入式控制、多媒体处理
调度器实现关键点
调度点:
时钟中断:定期检查是否需要切换任务系统调用:任务进入内核时可能触发调度阻塞操作:任务等待资源时主动让出CPUI/O操作完成:唤醒等待I/O的任务并可能重新调度
抢占式与非抢占式:
非抢占式:任务运行直至主动放弃CPU或阻塞抢占式:高优先级任务可以中断当前任务执行现代通用操作系统大多采用抢占式调度
上下文切换:
保存当前任务的所有寄存器值更新任务控制块状态选择下一个要执行的任务恢复新任务的寄存器值和执行环境可能包括页表切换(CR3寄存器)
现代操作系统中的调度器
Linux调度器:
早期:O(n)和O(1)调度器现代:完全公平调度器(CFS)
使用红黑树而非队列按虚拟运行时间排序任务自动平衡处理器资源
实时调度类:SCHED_FIFO和SCHED_RR
Windows调度器:
32级优先级系统可变优先级(0-15)和实时优先级(16-31)动态提升前台应用优先级处理器组实现多处理器系统负载均衡
macOS调度器:
基于Mach微内核的调度系统多级反馈队列的变种在Apple Silicon处理器上的异构核心调度
调度考虑的高级因素
多核和多处理器调度:
任务亲和性(CPU affinity)负载均衡NUMA架构的内存访问局部性
缓存和TLB优化:
避免频繁切换导致的缓存失效维持任务与处理器的亲和性
电源管理和能效:
合并空闲时间以允许处理器进入深度睡眠状态在异构核心处理器上选择适当核心运行任务
公平性与优先级平衡:
确保低优先级任务不会永远饥饿动态调整优先级以反映任务行为
任务调度是操作系统设计中最复杂和关键的部分之一,它直接影响系统的性能、响应性和用户体验。32位微处理器提供了必要的硬件支持(如定时器中断、保护模式和任务管理),而操作系统则在此基础上实现了各种复杂的调度算法,以满足不同应用场景的需求。
14.6 中断和异常处理
中断和异常是现代微处理器重要的事件处理机制,允许处理器对外部事件和程序异常进行快速响应和处理。
14.6.1 中断处理机制
中断是微处理器收到的需要立即注意的通知,通常由外部硬件、定时器或软件触发。中断处理机制使得CPU可以暂停当前任务,处理高优先级事件,再返回原任务。
c
#include <stdio.h>
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
// 中断描述符表(IDT)条目类型
typedef enum {
IDT_TASK_GATE = 0x5, // 任务门
IDT_INT_GATE = 0x6, // 中断门
IDT_TRAP_GATE = 0x7 // 陷阱门
} IdtGateType;
// 中断描述符表条目结构 (中断/陷阱门)
typedef struct {
uint16_t offsetLow; // 处理程序地址低16位
uint16_t selector; // 代码段选择子
uint8_t reserved; // 保留,设为0
uint8_t type : 3; // 门类型 (5=任务门, 6=中断门, 7=陷阱门)
uint8_t d : 1; // 大小标志 (0=16位, 1=32位)
uint8_t s : 1; // 存储段标志 (必须为0表示系统段)
uint8_t dpl : 2; // 描述符特权级 (0-3)
uint8_t p : 1; // 存在位
uint16_t offsetHigh; // 处理程序地址高16位
} __attribute__((packed)) IdtEntry;
// 中断描述符表寄存器 (IDTR) 结构
typedef struct {
uint16_t limit; // IDT大小减1
uint32_t base; // IDT基址
} __attribute__((packed)) IdtRegister;
// 中断向量类型
typedef enum {
// 处理器预定义异常
INT_DIVIDE_ERROR = 0,
INT_DEBUG = 1,
INT_NMI = 2,
INT_BREAKPOINT = 3,
INT_OVERFLOW = 4,
INT_BOUND_RANGE = 5,
INT_INVALID_OPCODE = 6,
INT_DEVICE_NOT_AVAILABLE = 7,
INT_DOUBLE_FAULT = 8,
INT_COPROCESSOR_SEGMENT = 9,
INT_INVALID_TSS = 10,
INT_SEGMENT_NOT_PRESENT = 11,
INT_STACK_SEGMENT_FAULT = 12,
INT_GENERAL_PROTECTION = 13,
INT_PAGE_FAULT = 14,
// 15是保留的
INT_FPU_ERROR = 16,
INT_ALIGNMENT_CHECK = 17,
INT_MACHINE_CHECK = 18,
INT_SIMD_EXCEPTION = 19,
// 20-31保留给Intel
// 可用的用户定义中断
INT_USER_START = 32,
INT_TIMER = 32, // 时钟中断
INT_KEYBOARD = 33, // 键盘中断
INT_COM2 = 35, // 串行端口COM2
INT_COM1 = 36, // 串行端口COM1
INT_LPT2 = 37, // 并行端口LPT2
INT_FLOPPY = 38, // 软盘控制器
INT_LPT1 = 39, // 并行端口LPT1
INT_RTC = 40, // 实时时钟
INT_MOUSE = 44, // PS/2鼠标
INT_COPROCESSOR = 45, // 浮点协处理器
INT_HARDDISK = 46, // 硬盘控制器
INT_USER_END = 47,
// 软件中断
INT_SYSCALL = 0x80 // Linux系统调用
} InterruptVector;
// PIC (可编程中断控制器) 端口
#define PIC1_COMMAND 0x20 // 主PIC命令端口
#define PIC1_DATA 0x21 // 主PIC数据端口
#define PIC2_COMMAND 0xA0 // 从PIC命令端口
#define PIC2_DATA 0xA1 // 从PIC数据端口
// PIC命令
#define PIC_EOI 0x20 // End Of Interrupt命令
// 中断处理函数指针类型
typedef void (*InterruptHandler)(uint32_t);
// 模拟中断处理函数数组
InterruptHandler interruptHandlers[256];
// 模拟中断描述符表
IdtEntry idtEntries[256];
// 模拟处理器状态
typedef struct {
uint32_t eax, ebx, ecx, edx; // 通用寄存器
uint32_t esi, edi, ebp, esp; // 指针寄存器
uint32_t eip; // 指令指针
uint16_t cs, ds, ss, es, fs, gs;// 段寄存器
uint32_t eflags; // 标志寄存器
bool interruptsEnabled; // 中断使能状态
} CpuState;
// 模拟栈帧 (中断处理程序中用于访问中断发生时的上下文)
typedef struct {
uint32_t edi, esi, ebp, esp, ebx, edx, ecx, eax; // 通过pusha保存的寄存器
uint32_t interruptNumber; // 中断号
uint32_t errorCode; // 错误码 (某些中断提供)
uint32_t eip, cs, eflags, userEsp, userSs; // CPU自动保存的内容
} InterruptFrame;
// 设置IDT表项
void setIdtGate(uint8_t num, uint32_t handler, uint16_t selector, uint8_t flags) {
idtEntries[num].offsetLow = handler & 0xFFFF;
idtEntries[num].offsetHigh = (handler >> 16) & 0xFFFF;
idtEntries[num].selector = selector;
idtEntries[num].reserved = 0;
idtEntries[num].type = flags & 0x7;
idtEntries[num].d = (flags >> 3) & 0x1;
idtEntries[num].s = 0; // 系统段
idtEntries[num].dpl = (flags >> 4) & 0x3;
idtEntries[num].p = 1; // 存在
}
// 初始化IDT
void initializeIdt() {
// 填充IDT表项
for (int i = 0; i < 256; i++) {
setIdtGate(i, 0, 0x08, 0); // 内核代码段选择子通常为0x08
}
// 设置CPU异常处理程序
setIdtGate(INT_DIVIDE_ERROR, (uint32_t)&interruptHandlers[INT_DIVIDE_ERROR], 0x08, IDT_INT_GATE | (0 << 4)); // DPL=0
setIdtGate(INT_DEBUG, (uint32_t)&interruptHandlers[INT_DEBUG], 0x08, IDT_TRAP_GATE | (0 << 4)); // DPL=0
setIdtGate(INT_BREAKPOINT, (uint32_t)&interruptHandlers[INT_BREAKPOINT], 0x08, IDT_TRAP_GATE | (3 << 4)); // DPL=3
setIdtGate(INT_OVERFLOW, (uint32_t)&interruptHandlers[INT_OVERFLOW], 0x08, IDT_TRAP_GATE | (3 << 4)); // DPL=3
setIdtGate(INT_PAGE_FAULT, (uint32_t)&interruptHandlers[INT_PAGE_FAULT], 0x08, IDT_INT_GATE | (0 << 4)); // DPL=0
setIdtGate(INT_GENERAL_PROTECTION, (uint32_t)&interruptHandlers[INT_GENERAL_PROTECTION], 0x08, IDT_INT_GATE | (0 << 4)); // DPL=0
// 设置硬件中断处理程序
for (int i = INT_USER_START; i <= INT_USER_END; i++) {
setIdtGate(i, (uint32_t)&interruptHandlers[i], 0x08, IDT_INT_GATE | (0 << 4)); // DPL=0
}
// 设置系统调用处理程序(软件中断)
setIdtGate(INT_SYSCALL, (uint32_t)&interruptHandlers[INT_SYSCALL], 0x08, IDT_TRAP_GATE | (3 << 4)); // DPL=3
// 在实际系统中,我们会使用lidt指令加载IDT
// lidt [idt_register]
IdtRegister idtr;
idtr.limit = sizeof(IdtEntry) * 256 - 1;
idtr.base = (uint32_t)&idtEntries;
printf("IDT初始化: 基址=0x%08X, 界限=0x%04X
", idtr.base, idtr.limit);
}
// 初始化PIC
void initializePic() {
// 在真实系统中,我们会向PIC发送命令
// ICW1: 开始初始化
// outb(PIC1_COMMAND, 0x11);
// outb(PIC2_COMMAND, 0x11);
// ICW2: 重新映射中断向量
// outb(PIC1_DATA, 0x20); // 主PIC中断向量从0x20(32)开始
// outb(PIC2_DATA, 0x28); // 从PIC中断向量从0x28(40)开始
// ICW3: 告诉PIC它们如何级联
// outb(PIC1_DATA, 0x04); // 主PIC使用IRQ2连接从PIC
// outb(PIC2_DATA, 0x02); // 从PIC的级联标识符
// ICW4: 附加信息
// outb(PIC1_DATA, 0x01); // 8086模式
// outb(PIC2_DATA, 0x01);
// 屏蔽所有中断,之后可以根据需要取消屏蔽
// outb(PIC1_DATA, 0xFF);
// outb(PIC2_DATA, 0xFF);
printf("PIC初始化: 主PIC向量偏移=0x20, 从PIC向量偏移=0x28
");
}
// 模拟中断发送EOI信号
void sendEoi(uint8_t irq) {
// 如果是从PIC上的中断,需要向两个PIC都发送EOI
if (irq >= 8) {
// outb(PIC2_COMMAND, PIC_EOI);
}
// outb(PIC1_COMMAND, PIC_EOI);
printf("发送EOI信号到PIC: IRQ=%d
", irq);
}
// 模拟处理器状态
CpuState cpuState;
// 初始化CPU状态
void initializeCpuState() {
memset(&cpuState, 0, sizeof(CpuState));
cpuState.cs = 0x08; // 内核代码段
cpuState.ds = cpuState.ss = cpuState.es = cpuState.fs = cpuState.gs = 0x10; // 内核数据段
cpuState.eflags = 0x00000202; // IF=1 (中断使能)
cpuState.eip = 0x10000000; // 模拟代码位置
cpuState.esp = 0xC0000FFC; // 模拟栈顶
cpuState.interruptsEnabled = true;
}
// 模拟中断处理流程
void handleInterrupt(uint8_t interruptNumber, uint32_t errorCode) {
printf("
====== 中断处理开始: INT %d ======
", interruptNumber);
// 检查中断是否使能
if (!cpuState.interruptsEnabled && interruptNumber >= 32) {
printf("中断被屏蔽,忽略中断请求
");
return;
}
// 保存处理器状态(模拟)
printf("1. 保存处理器状态
");
uint32_t savedEflags = cpuState.eflags;
uint32_t savedEip = cpuState.eip;
uint32_t savedCs = cpuState.cs;
uint32_t savedEsp = cpuState.esp;
uint32_t savedSs = cpuState.ss;
// 构建中断栈帧(模拟)
printf("2. 构建中断栈帧
");
cpuState.esp -= sizeof(InterruptFrame);
InterruptFrame* frame = (InterruptFrame*)cpuState.esp;
frame->eax = cpuState.eax;
frame->ebx = cpuState.ebx;
frame->ecx = cpuState.ecx;
frame->edx = cpuState.edx;
frame->esi = cpuState.esi;
frame->edi = cpuState.edi;
frame->ebp = cpuState.ebp;
frame->esp = savedEsp;
frame->eip = savedEip;
frame->cs = savedCs;
frame->eflags = savedEflags;
frame->interruptNumber = interruptNumber;
frame->errorCode = errorCode;
// 如果是中断门,清除IF标志禁止嵌套中断
if (idtEntries[interruptNumber].type == IDT_INT_GATE) {
cpuState.eflags &= ~0x200; // 清除IF位
cpuState.interruptsEnabled = false;
printf("3. 中断门: 禁止嵌套中断 (IF=0)
");
} else {
printf("3. 陷阱门: 允许嵌套中断 (IF保持不变)
");
}
// 获取中断处理程序
InterruptHandler handler = interruptHandlers[interruptNumber];
// 检查处理程序是否存在
if (handler) {
printf("4. 调用中断处理程序: 0x%08X
", (uint32_t)handler);
handler(interruptNumber);
} else {
printf("4. 错误: 中断处理程序未定义
");
}
// 如果是硬件中断,向PIC发送EOI
if (interruptNumber >= INT_USER_START && interruptNumber <= INT_USER_END) {
printf("5. 硬件中断: 发送EOI信号
");
sendEoi(interruptNumber - INT_USER_START);
} else {
printf("5. 软件中断/异常: 不需要发送EOI
");
}
// 恢复处理器状态(模拟IRET指令)
printf("6. 恢复处理器状态 (IRET)
");
cpuState.eip = savedEip;
cpuState.cs = savedCs;
cpuState.eflags = savedEflags;
cpuState.esp = savedEsp;
cpuState.interruptsEnabled = (savedEflags & 0x200) != 0;
printf("====== 中断处理结束 ======
");
}
// 模拟中断处理函数定义
void divideErrorHandler(uint32_t intNum) {
printf("除零错误处理程序
");
printf("- CPU尝试执行除法指令,除数为0
");
printf("- 错误必须修复才能继续执行
");
// 在实际系统中通常会终止有问题的进程
}
void pageFaultHandler(uint32_t intNum) {
// 在实际系统中,CR2寄存器包含导致页面错误的地址
uint32_t faultAddress = 0x12345678; // 假设值
printf("页面错误处理程序
");
printf("- 错误地址: 0x%08X
", faultAddress);
printf("- 错误码: 0x%08X
", ((InterruptFrame*)cpuState.esp)->errorCode);
// 解析错误码
uint32_t errorCode = ((InterruptFrame*)cpuState.esp)->errorCode;
printf(" 页面%s
", (errorCode & 1) ? "保护违规" : "不存在");
printf(" 访问类型: %s
", (errorCode & 2) ? "写入" : "读取");
printf(" 处理器模式: %s
", (errorCode & 4) ? "用户模式" : "内核模式");
// 在实际系统中,我们会尝试处理缺页或终止进程
}
void timerHandler(uint32_t intNum) {
static uint32_t tickCount = 0;
tickCount++;
printf("时钟中断处理程序
");
printf("- Tick计数: %u
", tickCount);
// 在实际系统中,我们会更新系统时间,并可能触发调度器
if (tickCount % 10 == 0) {
printf("- 触发任务调度
");
}
}
void keyboardHandler(uint32_t intNum) {
// 在实际系统中,我们会从键盘控制器读取扫描码
uint8_t scanCode = 0x1E; // 假设值,对应'A'键
printf("键盘中断处理程序
");
printf("- 扫描码: 0x%02X
", scanCode);
printf("- 按键: %c
", 'A'); // 简化示例
// 在实际系统中,我们会将键盘输入放入缓冲区或传递给活动任务
}
void syscallHandler(uint32_t intNum) {
// 系统调用通常使用寄存器传递参数
uint32_t syscallNum = cpuState.eax;
uint32_t arg1 = cpuState.ebx;
uint32_t arg2 = cpuState.ecx;
uint32_t arg3 = cpuState.edx;
printf("系统调用处理程序
");
printf("- 系统调用号: %u
", syscallNum);
printf("- 参数: 0x%08X, 0x%08X, 0x%08X
", arg1, arg2, arg3);
// 根据系统调用号执行不同操作
switch(syscallNum) {
case 1: // 示例: sys_exit
printf("- 系统调用: sys_exit(%d)
", arg1);
break;
case 4: // 示例: sys_write
printf("- 系统调用: sys_write(fd=%d, buf=0x%08X, count=%d)
", arg1, arg2, arg3);
break;
default:
printf("- 未知系统调用
");
break;
}
// 设置返回值
cpuState.eax = 0; // 成功
}
// 注册所有中断处理程序
void registerInterruptHandlers() {
// 初始化处理程序数组
for (int i = 0; i < 256; i++) {
interruptHandlers[i] = NULL;
}
// 注册CPU异常处理程序
interruptHandlers[INT_DIVIDE_ERROR] = divideErrorHandler;
interruptHandlers[INT_PAGE_FAULT] = pageFaultHandler;
// 注册硬件中断处理程序
interruptHandlers[INT_TIMER] = timerHandler;
interruptHandlers[INT_KEYBOARD] = keyboardHandler;
// 注册系统调用处理程序
interruptHandlers[INT_SYSCALL] = syscallHandler;
printf("中断处理程序注册完成
");
}
// 展示中断描述符类型
void explainGateTypes() {
printf("
中断描述符类型说明:
");
printf("==================
");
printf("1. 中断门 (Interrupt Gate):
");
printf(" - 类型值: 6 (32位中断门)
");
printf(" - 执行处理程序时自动禁用中断 (清除IF标志)
");
printf(" - 处理完成后,IRET指令恢复IF标志
");
printf(" - 适用于大多数硬件中断和需要防止嵌套的异常
");
printf("2. 陷阱门 (Trap Gate):
");
printf(" - 类型值: 7 (32位陷阱门)
");
printf(" - 执行处理程序时不改变中断状态
");
printf(" - 允许嵌套中断
");
printf(" - 适用于调试异常和系统调用
");
printf("3. 任务门 (Task Gate):
");
printf(" - 类型值: 5
");
printf(" - 执行完整的任务切换而非简单的处理程序调用
");
printf(" - 不直接包含处理程序地址,而是包含TSS选择子
");
printf(" - 很少在现代系统中使用
");
}
// 展示PIC工作原理
void explainPicOperation() {
printf("
PIC(可编程中断控制器)工作原理:
");
printf("===========================
");
printf("1. 基本组成:
");
printf(" - 主PIC: 处理IRQ 0-7 (中断向量 0x20-0x27)
");
printf(" - 从PIC: 处理IRQ 8-15 (中断向量 0x28-0x2F)
");
printf(" - 两个PIC通过IRQ2级联
");
printf("2. IRQ到中断向量的映射:
");
printf(" - IRQ 0 (时钟) -> INT 0x20 (32)
");
printf(" - IRQ 1 (键盘) -> INT 0x21 (33)
");
printf(" - IRQ 2 (级联) -> 连接从PIC
");
printf(" - IRQ 3 (COM2) -> INT 0x23 (35)
");
printf(" - IRQ 4 (COM1) -> INT 0x24 (36)
");
printf(" - IRQ 8 (RTC) -> INT 0x28 (40)
");
printf(" - IRQ 12 (鼠标) -> INT 0x2C (44)
");
printf(" - IRQ 14 (硬盘) -> INT 0x2E (46)
");
printf("3. 中断处理流程:
");
printf(" a) 设备触发中断请求 (IRQ)
");
printf(" b) PIC确认并向CPU发送中断信号
");
printf(" c) CPU完成当前指令并检查中断标志(IF)
");
printf(" d) 如果IF=1,CPU通过IDT调用对应的处理程序
");
printf(" e) 处理程序完成后向PIC发送EOI命令
");
printf(" f) PIC清除IRQ状态,允许后续中断
");
printf("4. 中断屏蔽:
");
printf(" - 每个PIC有8位中断屏蔽寄存器
");
printf(" - 每位对应一个IRQ线
");
printf(" - 1=禁用该IRQ, 0=启用该IRQ
");
printf(" - 通过写入PIC数据端口设置屏蔽
");
}
// 展示中断处理流程
void explainInterruptHandling() {
printf("
中断处理流程详解:
");
printf("===============
");
printf("1. 中断发生:
");
printf(" - 硬件中断: 由外部设备通过PIC触发
");
printf(" - 软件中断: 由指令(INT)触发
");
printf(" - 异常: 由CPU在执行指令时检测到错误条件触发
");
printf("2. CPU响应中断:
");
printf(" - 完成当前执行的指令
");
printf(" - 确定中断向量号
");
printf(" - 检查中断描述符表中对应的条目
");
printf("3. 上下文切换:
");
printf(" - 将当前的EFLAGS, CS, EIP压入栈
");
printf(" - 如果发生特权级变化,还会保存SS和ESP
");
printf(" - 如果异常产生错误码,将错误码压入栈
");
printf(" - 加载中断/陷阱门中的段选择子到CS
");
printf(" - 加载中断/陷阱门中的偏移到EIP
");
printf("4. 中断处理:
");
printf(" - 执行中断处理程序代码
");
printf(" - 对于硬件中断,通常需要与设备交互并发送EOI
");
printf(" - 对于异常,可能需要修复错误或终止进程
");
printf(" - 对于系统调用,执行请求的内核功能
");
printf("5. 返回到原始代码:
");
printf(" - 执行IRET指令
");
printf(" - 从栈中弹出保存的EFLAGS, CS, EIP
");
printf(" - 如果发生了特权级变化,还会恢复SS和ESP
");
printf(" - 继续执行原始代码
");
}
// 展示中断在系统中的作用
void explainInterruptSystemRole() {
printf("
中断在操作系统中的关键作用:
");
printf("=======================
");
printf("1. 设备驱动程序基础:
");
printf(" - 提供异步硬件事件通知
");
printf(" - 允许设备在数据准备好时通知CPU
");
printf(" - 避免轮询,提高系统效率
");
printf("2. 时间管理:
");
printf(" - 时钟中断提供精确计时
");
printf(" - 维护系统日期和时间
");
printf(" - 实现定时器和超时功能
");
printf("3. 多任务处理:
");
printf(" - 时钟中断触发任务调度
");
printf(" - 实现时间片轮转调度
");
printf(" - 抢占式多任务的基础
");
printf("4. 内存管理:
");
printf(" - 页面错误处理实现虚拟内存
");
printf(" - 按需加载程序页面
");
printf(" - 内存保护违规检测
");
printf("5. 系统调用实现:
");
printf(" - 用户程序通过中断请求内核服务
");
printf(" - 提供用户态和内核态之间的安全转换
");
printf(" - 实现权限隔离和控制
");
printf("6. 错误处理和恢复:
");
printf(" - 异常提供错误检测机制
");
printf(" - 允许操作系统捕获和处理错误
");
printf(" - 保护系统免受错误程序的影响
");
}
// 演示中断和APIC
void explainAdvancedInterruptFeatures() {
printf("
高级中断特性:
");
printf("===========
");
printf("1. APIC (高级可编程中断控制器):
");
printf(" - 替代传统的8259 PIC
");
printf(" - 包括Local APIC和I/O APIC
");
printf(" - 支持多处理器系统
");
printf(" - 提供更多中断向量
");
printf(" - 支持中断优先级和更复杂的路由
");
printf("2. MSI (消息信号中断):
");
printf(" - 现代PCI设备使用的中断机制
");
printf(" - 不使用物理中断线
");
printf(" - 通过内存写操作触发中断
");
printf(" - 减少中断共享,提高性能
");
printf("3. 中断优先级和嵌套:
");
printf(" - APIC提供256级优先级
");
printf(" - 支持中断嵌套
");
printf(" - 高优先级中断可以抢占低优先级中断处理
");
printf("4. 处理器间中断 (IPI):
");
printf(" - 一个CPU核心向其他核心发送中断
");
printf(" - 用于多核协调和缓存一致性
");
printf(" - 支持TLB刷新、调度和系统管理
");
}
// 模拟中断测试场景
void simulateInterruptScenarios() {
printf("
模拟中断场景:
");
printf("============
");
// 场景1: 除零异常
printf("
场景1: 除零异常
");
printf("模拟指令: div ebx (当ebx=0时)
");
handleInterrupt(INT_DIVIDE_ERROR, 0);
// 场景2: 页面错误
printf("
场景2: 页面错误
");
printf("模拟指令: mov eax, [0x12345678] (访问未映射内存)
");
// 错误码示例: 0x4 表示用户模式读取不存在的页面
handleInterrupt(INT_PAGE_FAULT, 0x4);
// 场景3: 时钟中断
printf("
场景3: 硬件时钟中断
");
printf("PIT计数器溢出触发IRQ0
");
handleInterrupt(INT_TIMER, 0);
// 场景4: 键盘中断
printf("
场景4: 键盘中断
");
printf("用户按下键盘键触发IRQ1
");
handleInterrupt(INT_KEYBOARD, 0);
// 场景5: 系统调用
printf("
场景5: 系统调用
");
printf("模拟指令: int 0x80 (带参数: eax=4, ebx=1, ecx=buffer, edx=count)
");
cpuState.eax = 4; // sys_write
cpuState.ebx = 1; // stdout
cpuState.ecx = 0x8048000; // 缓冲区地址
cpuState.edx = 10; // 字节数
handleInterrupt(INT_SYSCALL, 0);
// 场景6: 嵌套中断
printf("
场景6: 嵌套中断场景
");
printf("处理时钟中断时发生键盘中断
");
// 先触发时钟中断
handleInterrupt(INT_TIMER, 0);
// 在时钟中断处理程序执行期间(模拟),触发键盘中断
// 注意:因为时钟是通过中断门处理的,此时中断被禁止,所以键盘中断应该被延迟
handleInterrupt(INT_KEYBOARD, 0);
}
int main() {
printf("32位微处理器的中断处理机制
");
printf("======================
");
printf("中断是微处理器收到的需要立即注意的通知,通常由外部硬件、定时器或软件触发。
");
printf("中断处理机制使得CPU可以暂停当前任务,处理高优先级事件,再返回原任务。
");
// 初始化CPU状态
initializeCpuState();
// 注册中断处理程序
registerInterruptHandlers();
// 初始化IDT
initializeIdt();
// 初始化PIC
initializePic();
// 解释门类型
explainGateTypes();
// 解释PIC工作原理
explainPicOperation();
// 解释中断处理流程
explainInterruptHandling();
// 解释中断在系统中的作用
explainInterruptSystemRole();
// 解释高级中断特性
explainAdvancedInterruptFeatures();
// 模拟中断场景
simulateInterruptScenarios();
return 0;
}32位微处理器的中断处理机制是现代计算机系统的核心组件,使处理器能够响应异步事件并处理程序执行中的异常情况。中断允许外部设备与CPU通信,支持操作系统提供多任务处理、设备驱动、错误管理等关键功能。
中断基本概念
中断是向处理器发出的需要立即注意的信号,导致当前指令流被暂停,转而执行特定的处理程序。中断分为三大类:
硬件中断:由外部设备(如键盘、硬盘、网卡)通过中断控制器触发。软件中断:由程序执行特定指令(如INT)主动触发,常用于系统调用。处理器异常:由CPU在执行指令时检测到的异常条件(如除零、页错误)触发。
中断处理基础结构
中断描述符表(IDT)
IDT是一个包含最多256个中断描述符的数组,由IDTR寄存器指向。每个描述符包含:
中断处理程序的段选择子和偏移地址描述符类型(中断门、陷阱门、任务门)特权级要求和状态标志
中断描述符有三种主要类型:
中断门:执行处理程序时自动禁用进一步中断(清除IF标志)陷阱门:执行处理程序时保持中断状态不变任务门:触发完整的任务切换而非简单的处理程序调用
中断向量分配
x86架构预定义了0-31号向量用于处理器异常:
0:除零错误1:调试异常2:非屏蔽中断3:断点13:一般保护错误14:页错误等等…
向量32-255可用于硬件中断和软件中断:
32-47:通常映射到IRQ 0-15(硬件中断)128 (0x80):常用于系统调用
中断控制器
8259 PIC(可编程中断控制器)
传统的中断控制器,由两个级联的控制器组成:
主PIC:处理IRQ 0-7,映射到中断向量32-39从PIC:处理IRQ 8-15,映射到中断向量40-47常见IRQ分配:
IRQ 0:系统定时器IRQ 1:键盘IRQ 4:串口COM1IRQ 14:主硬盘控制器
APIC(高级可编程中断控制器)
现代系统中PIC的替代品,支持多处理器:
Local APIC:集成在每个CPU核心中I/O APIC:连接外部设备提供更多中断向量和更灵活的中断路由支持处理器间中断(IPI)提供更精确的中断优先级
中断处理流程
当中断发生时,CPU执行以下步骤:
完成当前指令:中断总是在指令边界处理保存执行上下文:
EFLAGS, CS, EIP被压入栈如果涉及特权级转换,SS和ESP也被保存某些异常会产生错误码,也会被压入栈
查找处理程序:
通过中断向量查找IDT中的描述符加载处理程序的CS:EIP
设置中断状态:
如果是中断门,清除IF标志(禁止嵌套中断)如果是陷阱门,保持IF标志不变
执行处理程序:
处理程序通常会保存更多寄存器(通过PUSHA等)处理中断事件对于硬件中断,发送EOI信号到中断控制器
恢复上下文并返回:
IRET指令弹出保存的EIP, CS, EFLAGS如果发生特权级变化,还会恢复SS和ESP继续执行原始代码
中断屏蔽和优先级
IF标志:位于EFLAGS寄存器中,控制是否响应可屏蔽中断
CLI指令清除IF,禁止中断STI指令设置IF,允许中断
NMI(非屏蔽中断):不受IF标志控制,总是被处理
通常用于严重硬件错误
中断屏蔽寄存器:PIC中的IMR可选择性地屏蔽各个IRQ
中断在系统中的关键作用
设备驱动程序基础:提供异步硬件事件通知时间管理:时钟中断提供精确计时和调度点多任务处理:时钟中断触发任务切换和调度内存管理:页面错误处理实现虚拟内存系统调用:通过软件中断安全地从用户态切换到内核态错误处理:异常提供错误检测和恢复机制
中断处理机制是32位微处理器架构中最基础也是最强大的特性之一,为操作系统提供了响应外部事件、管理资源和实现保护的关键机制。它是现代多任务操作系统可靠运行的核心基础。
14.6.2 异常处理机制
异常是处理器在执行程序时检测到的特殊条件,它会打断正常的指令流并触发相应的处理程序。异常处理机制允许操作系统识别和应对各种错误条件和特殊情况。
c
#include <stdio.h>
#include <stdint.h>
#include <stdbool.h>
#include <string.h>
// 异常类型枚举
typedef enum {
// 故障类异常 (Fault): 可能被修正并重新执行指令
EXC_DIVIDE_ERROR = 0, // 除零错误
EXC_DEBUG = 1, // 调试异常
EXC_BREAKPOINT = 3, // 断点
EXC_OVERFLOW = 4, // 溢出
EXC_BOUND_RANGE_EXCEEDED = 5, // 越界
EXC_INVALID_OPCODE = 6, // 无效操作码
EXC_DEVICE_NOT_AVAILABLE = 7, // 设备不可用 (协处理器)
EXC_DOUBLE_FAULT = 8, // 双重故障
EXC_COPROCESSOR_SEGMENT = 9, // 协处理器段溢出
EXC_INVALID_TSS = 10, // 无效TSS
EXC_SEGMENT_NOT_PRESENT = 11, // 段不存在
EXC_STACK_FAULT = 12, // 栈段故障
EXC_GENERAL_PROTECTION = 13, // 一般保护错误
EXC_PAGE_FAULT = 14, // 页面错误
EXC_FPU_ERROR = 16, // 浮点单元错误
EXC_ALIGNMENT_CHECK = 17, // 对齐检查
EXC_MACHINE_CHECK = 18, // 机器检查
EXC_SIMD_EXCEPTION = 19, // SIMD浮点异常
EXC_VIRTUALIZATION = 20, // 虚拟化异常
// 陷阱类异常 (Trap): 在指令执行后触发
EXC_INT3 = 3, // INT 3指令 (与断点相同)
EXC_INTO = 4, // INTO指令 (与溢出相同)
// 终止类异常 (Abort): 不精确报告错误,不允许继续
EXC_MACHINE_CHECK_ABORT = 18, // 严重机器检查导致的终止
} ExceptionType;
// 异常处理方式
typedef enum {
HANDLER_FAULT, // 故障处理
HANDLER_TRAP, // 陷阱处理
HANDLER_ABORT // 终止处理
} HandlerType;
// 错误码标志位
#define ERR_EXTERNAL 0x01 // 0=CPU内部事件, 1=外部事件
#define ERR_IDT 0x02 // 0=GDT/LDT, 1=IDT
#define ERR_TI 0x04 // 0=GDT, 1=LDT (仅当IDT=0时)
#define ERR_INDEX_MASK 0xFFF8 // 段/门选择子索引
#define ERR_PF_PRESENT 0x01 // 页面错误: 0=不存在, 1=保护违规
#define ERR_PF_WRITE 0x02 // 页面错误: 0=读, 1=写
#define ERR_PF_USER 0x04 // 页面错误: 0=内核, 1=用户
#define ERR_PF_RESERVED 0x08 // 页面错误: 0=非保留位错误, 1=保留位错误
#define ERR_PF_INSTRUCTION 0x10 // 页面错误: 0=非指令获取, 1=指令获取
// 异常上下文结构 (保存在栈上的异常现场)
typedef struct {
uint32_t edi, esi, ebp, esp, ebx, edx, ecx, eax; // 通用寄存器 (PUSHA指令保存)
uint32_t exceptionNumber; // 异常号
uint32_t errorCode; // 错误码 (某些异常有)
uint32_t eip, cs, eflags, userEsp, userSs; // CPU自动保存的内容
} ExceptionContext;
// 异常描述结构
typedef struct {
ExceptionType type;
const char* name;
const char* description;
HandlerType handlerType;
bool hasErrorCode;
const char* possibleCauses;
} ExceptionInfo;
// 模拟处理器状态
typedef struct {
uint32_t eax, ebx, ecx, edx; // 通用寄存器
uint32_t esi, edi, ebp, esp; // 指针寄存器
uint32_t eip; // 指令指针
uint16_t cs, ds, ss, es, fs, gs; // 段寄存器
uint32_t eflags; // 标志寄存器
uint32_t cr0, cr2, cr3, cr4; // 控制寄存器
bool inKernelMode; // 是否在内核模式
} CpuState;
// 定义异常信息表
ExceptionInfo exceptionTable[] = {
{EXC_DIVIDE_ERROR, "除零错误", "除法操作的除数为零或结果溢出", HANDLER_FAULT, false,
"DIV或IDIV指令的除数为0; 除法结果太大无法放入目标寄存器"},
{EXC_DEBUG, "调试异常", "调试条件发生", HANDLER_FAULT, false,
"单步执行; 硬件断点触发; 调试寄存器访问; 任务切换"},
{EXC_BREAKPOINT, "断点", "执行INT 3指令", HANDLER_TRAP, false,
"执行了INT 3指令 (0xCC); 由调试器插入的软件断点"},
{EXC_OVERFLOW, "溢出", "执行INTO指令时OF标志被设置", HANDLER_TRAP, false,
"INTO指令在OF标志位于1时执行; 有符号整数运算导致溢出"},
{EXC_BOUND_RANGE_EXCEEDED, "越界", "BOUND指令检测到越界", HANDLER_FAULT, false,
"BOUND指令检测到索引超出了指定范围"},
{EXC_INVALID_OPCODE, "无效操作码", "CPU无法识别的指令", HANDLER_FAULT, false,
"CPU无法识别的指令; 使用了保留操作码; 使用了带无效操作数的指令"},
{EXC_DEVICE_NOT_AVAILABLE, "设备不可用", "浮点或SIMD指令但协处理器不可用", HANDLER_FAULT, false,
"尝试执行浮点指令但CR0.EM=1或CR0.TS=1; 没有数学协处理器或未启用"},
{EXC_DOUBLE_FAULT, "双重故障", "异常处理期间发生第二个异常", HANDLER_ABORT, true,
"异常处理程序导致第二个异常; 通常预示着严重的系统问题"},
{EXC_COPROCESSOR_SEGMENT, "协处理器段溢出", "浮点指令导致段溢出", HANDLER_FAULT, false,
"老式浮点单元在保护模式下访问超过段界限 (387之前的CPU才有此异常)"},
{EXC_INVALID_TSS, "无效TSS", "任务切换或TSS访问期间检测到无效TSS", HANDLER_FAULT, true,
"TSS中的段选择子无效; TSS类型错误; 任务切换到不可用任务"},
{EXC_SEGMENT_NOT_PRESENT, "段不存在", "尝试加载不存在的段", HANDLER_FAULT, true,
"段描述符的存在位(P)为0; 尝试加载未加载到内存的段"},
{EXC_STACK_FAULT, "栈段故障", "栈操作或SS加载违规", HANDLER_FAULT, true,
"栈操作超出栈段界限; SS选择子指向描述符P=0; 栈段权限不足"},
{EXC_GENERAL_PROTECTION, "一般保护错误", "保护机制检测到的违规", HANDLER_FAULT, true,
"段级保护违规; 权限级别不足; 写只读段; 越界访问; NULL选择子"},
{EXC_PAGE_FAULT, "页面错误", "页面级保护违规或页面不存在", HANDLER_FAULT, true,
"访问不存在的页; 权限不足; 保留位错误"},
{EXC_FPU_ERROR, "浮点单元错误", "协处理器检测到的错误", HANDLER_FAULT, false,
"浮点指令执行期间发生错误; 除零; 无效操作; 浮点溢出/下溢"},
{EXC_ALIGNMENT_CHECK, "对齐检查", "访问未对齐的数据", HANDLER_FAULT, true,
"在开启对齐检查(CR0.AM=1,EFLAGS.AC=1)时访问未适当对齐的数据"},
{EXC_MACHINE_CHECK, "机器检查", "CPU检测到硬件错误", HANDLER_ABORT, false,
"CPU检测到内部错误或总线错误; 实际错误由特定CPU型号决定"},
{EXC_SIMD_EXCEPTION, "SIMD浮点异常", "SSE/SSE2指令执行期间错误", HANDLER_FAULT, false,
"SIMD浮点指令执行期间发生错误; 除零; 精度错误; 无效操作"},
{EXC_VIRTUALIZATION, "虚拟化异常", "虚拟化操作违规", HANDLER_FAULT, false,
"虚拟化扩展相关的操作违规; 通常在虚拟化环境中才会发生"}
};
// 模拟处理器状态
CpuState cpuState;
// 初始化CPU状态
void initializeCpuState() {
memset(&cpuState, 0, sizeof(CpuState));
cpuState.cs = 0x08; // 内核代码段
cpuState.ds = cpuState.ss = cpuState.es = cpuState.fs = cpuState.gs = 0x10; // 内核数据段
cpuState.eflags = 0x00000202; // IF=1 (中断使能)
cpuState.eip = 0x10000000; // 模拟代码位置
cpuState.esp = 0xC0000FFC; // 模拟栈顶
cpuState.cr0 = 0x80000011; // PE=1, PG=1 (保护模式和分页启用)
cpuState.cr3 = 0x00100000; // 页目录基址
cpuState.inKernelMode = true;
}
// 获取异常信息
ExceptionInfo* getExceptionInfo(ExceptionType type) {
int count = sizeof(exceptionTable) / sizeof(ExceptionInfo);
for (int i = 0; i < count; i++) {
if (exceptionTable[i].type == type) {
return &exceptionTable[i];
}
}
return NULL;
}
// 打印异常信息
void printExceptionInfo(ExceptionInfo* info) {
printf("异常信息:
");
printf(" 类型: %d (%s)
", info->type, info->name);
printf(" 描述: %s
", info->description);
printf(" 处理方式: ");
switch (info->handlerType) {
case HANDLER_FAULT:
printf("故障(Fault) - 可能被修复并重试指令
");
break;
case HANDLER_TRAP:
printf("陷阱(Trap) - 在指令执行后触发
");
break;
case HANDLER_ABORT:
printf("终止(Abort) - 严重错误,不精确报告
");
break;
}
printf(" 错误码: %s
", info->hasErrorCode ? "有" : "无");
printf(" 可能原因: %s
", info->possibleCauses);
}
// 解析一般保护错误码
void decodeGPErrorCode(uint32_t errorCode) {
printf("错误码解析 (GP/TS/SS/NP): 0x%08X
", errorCode);
printf(" 来源: %s
", (errorCode & ERR_EXTERNAL) ? "外部事件" : "CPU内部");
printf(" 描述符表: %s
", (errorCode & ERR_IDT) ? "IDT" : ((errorCode & ERR_TI) ? "LDT" : "GDT"));
printf(" 选择子索引: %d
", (errorCode & ERR_INDEX_MASK) >> 3);
}
// 解析页面错误错误码
void decodePageFaultErrorCode(uint32_t errorCode) {
printf("页面错误码解析: 0x%08X
", errorCode);
printf(" 类型: %s
", (errorCode & ERR_PF_PRESENT) ? "保护违规" : "页面不存在");
printf(" 操作: %s
", (errorCode & ERR_PF_WRITE) ? "写入" : "读取");
printf(" 权限: %s模式
", (errorCode & ERR_PF_USER) ? "用户" : "内核");
if (errorCode & ERR_PF_RESERVED)
printf(" 原因: 页表中保留位被设置
");
if (errorCode & ERR_PF_INSTRUCTION)
printf(" 访问类型: 指令获取
");
else
printf(" 访问类型: 数据访问
");
}
// 模拟异常处理流程
void handleException(ExceptionType exceptionType, uint32_t errorCode, uint32_t faultAddress) {
ExceptionInfo* info = getExceptionInfo(exceptionType);
if (!info) {
printf("未知异常: %d
", exceptionType);
return;
}
printf("
====== 异常处理开始: %s ======
", info->name);
// 打印异常信息
printExceptionInfo(info);
// 保存处理器状态(模拟)
printf("
保存处理器状态
");
uint32_t savedEflags = cpuState.eflags;
uint32_t savedEip = cpuState.eip;
uint32_t savedCs = cpuState.cs;
uint32_t savedEsp = cpuState.esp;
uint32_t savedSs = cpuState.ss;
// 构建异常栈帧(模拟)
printf("构建异常栈帧
");
cpuState.esp -= sizeof(ExceptionContext);
ExceptionContext* context = (ExceptionContext*)cpuState.esp;
context->eax = cpuState.eax;
context->ebx = cpuState.ebx;
context->ecx = cpuState.ecx;
context->edx = cpuState.edx;
context->esi = cpuState.esi;
context->edi = cpuState.edi;
context->ebp = cpuState.ebp;
context->esp = savedEsp;
context->eip = savedEip;
context->cs = savedCs;
context->eflags = savedEflags;
context->exceptionNumber = exceptionType;
context->errorCode = errorCode;
// 如果是页面错误,更新CR2寄存器
if (exceptionType == EXC_PAGE_FAULT) {
cpuState.cr2 = faultAddress;
printf("CR2寄存器设置为故障地址: 0x%08X
", faultAddress);
}
// 确保我们在内核模式下执行处理程序
if (!cpuState.inKernelMode) {
printf("从用户模式切换到内核模式
");
cpuState.inKernelMode = true;
}
// 解析特定异常的错误码
if (info->hasErrorCode) {
if (exceptionType == EXC_PAGE_FAULT) {
decodePageFaultErrorCode(errorCode);
} else {
decodeGPErrorCode(errorCode);
}
}
printf("
异常处理...
");
// 模拟对不同异常的处理
switch (exceptionType) {
case EXC_DIVIDE_ERROR:
printf("- 除零错误通常会导致程序终止
");
printf("- 发送SIGFPE信号给进程
");
printf("- 中止包含故障指令的进程
");
break;
case EXC_PAGE_FAULT:
if (!(errorCode & ERR_PF_PRESENT)) {
printf("- 处理缺页错误
");
printf("- 检查地址是否在有效的虚拟内存区域
");
printf("- 如果有效,分配物理页框并映射
");
printf("- 如果无效,发送SIGSEGV信号给进程
");
// 模拟页面分配过程
printf("- 模拟: 为地址0x%08X分配物理页
", faultAddress);
if (faultAddress < 0x80000000) {
printf("- 有效地址,分配物理页面并更新页表
");
printf("- 设置相应页表项: PTE[%d] = 0x%08X
",
(faultAddress >> 12) & 0x3FF, 0x00057 | ((faultAddress & 0xFFC00000) >> 10));
printf("- 异常处理完成后,指令将被重新执行
");
} else {
printf("- 无效地址,进程访问越界内存
");
printf("- 发送SIGSEGV信号给进程
");
printf("- 进程将被终止
");
}
} else {
printf("- 处理页保护违规
");
printf("- 检查是否为写时复制情况
");
if ((errorCode & ERR_PF_WRITE) && faultAddress < 0x40000000) {
printf("- 写时复制情况: 创建页面副本
");
printf("- 复制页面内容到新页框
");
printf("- 更新页表项为可写
");
printf("- 异常处理完成后,指令将被重新执行
");
} else {
printf("- 保护违规,发送SIGSEGV信号给进程
");
printf("- 进程将被终止
");
}
}
break;
case EXC_GENERAL_PROTECTION:
printf("- 一般保护错误通常表明程序错误
");
printf("- 发送SIGSEGV信号给进程
");
printf("- 常见原因是非法内存引用或特权级违规
");
printf("- 进程将被终止
");
break;
case EXC_BREAKPOINT:
printf("- 断点异常通常由调试器处理
");
printf("- 保存所有寄存器用于调试器检查
");
printf("- 将控制权转移给调试器
");
printf("- 调试器可能让程序继续,单步执行或检查内存
");
printf("- EIP已经指向下一条指令,无需调整
");
break;
case EXC_INVALID_OPCODE:
printf("- 无效操作码通常表明程序错误
");
printf("- 发送SIGILL信号给进程
");
printf("- 可能原因: 错误的指令编码或尝试使用未支持的指令
");
printf("- 进程将被终止
");
break;
case EXC_DOUBLE_FAULT:
printf("- 双重故障是严重的系统错误
");
printf("- 表明异常处理程序本身产生了异常
");
printf("- 内核通常会崩溃并记录错误
");
printf("- 在某些情况下可能尝试重启系统
");
break;
default:
printf("- 根据异常类型执行特定处理
");
printf("- 更新处理器状态或进程状态
");
printf("- 可能向进程发送信号或终止进程
");
}
// 根据处理类型决定是否重新执行指令
if (info->handlerType == HANDLER_FAULT) {
printf("
故障类异常处理完成。如果成功修复,将重新执行导致异常的指令
");
} else if (info->handlerType == HANDLER_TRAP) {
printf("
陷阱类异常处理完成。将继续执行异常后的指令
");
} else { // HANDLER_ABORT
printf("
终止类异常处理完成。系统可能无法恢复
");
}
printf("====== 异常处理结束 ======
");
}
// 演示异常处理类型的区别
void explainExceptionHandlerTypes() {
printf("
异常处理类型的区别:
");
printf("==============
");
printf("1. 故障(Fault):
");
printf(" - 可恢复的错误
");
printf(" - 异常处理返回到引起故障的指令
");
printf(" - 允许修复问题并重新执行指令
");
printf(" - 示例: 页面错误,可以加载页面后重试
");
printf(" - 返回地址 = 故障指令地址
");
printf("
");
printf("2. 陷阱(Trap):
");
printf(" - 在指令执行后报告
");
printf(" - 异常处理返回到引起陷阱的指令之后
");
printf(" - 常用于调试和系统调用
");
printf(" - 示例: 断点(INT3),调试异常
");
printf(" - 返回地址 = 陷阱指令之后的地址
");
printf("
");
printf("3. 终止(Abort):
");
printf(" - 严重错误,可能无法恢复
");
printf(" - 可能不提供准确的故障位置
");
printf(" - 通常导致程序或系统终止
");
printf(" - 示例: 双重故障,机器检查异常
");
printf(" - 可能无法返回到原程序
");
printf("
");
printf("返回地址比较图示:
");
printf("指令序列: A → B → C → D → E
");
printf("如果B引起故障: 处理后返回到B
");
printf("如果B引起陷阱: 处理后返回到C
");
printf("如果B引起终止: 可能无法返回
");
}
// 演示错误码的作用和解析
void explainErrorCodes() {
printf("
错误码的作用和解析:
");
printf("==============
");
printf("1. 错误码目的:
");
printf(" - 提供导致异常的额外信息
");
printf(" - 帮助处理程序确定异常的具体原因
");
printf(" - 使处理程序能够精确定位问题
");
printf("
");
printf("2. 提供错误码的异常:
");
printf(" - 双重故障 (#DF)
");
printf(" - 无效TSS (#TS)
");
printf(" - 段不存在 (#NP)
");
printf(" - 栈段故障 (#SS)
");
printf(" - 一般保护 (#GP)
");
printf(" - 页面错误 (#PF)
");
printf(" - 对齐检查 (#AC)
");
printf("
");
printf("3. 一般保护和段相关错误码格式:
");
printf(" Bit 0: EXT - 外部事件标志 (0=内部, 1=外部)
");
printf(" Bit 1: IDT - 描述符表标志 (0=GDT/LDT, 1=IDT)
");
printf(" Bit 2: TI - 表标志 (0=GDT, 1=LDT) 当IDT=0时
");
printf(" Bits 3-15: 描述符表中的选择子索引
");
printf(" 示例: 0x0008 = GDT中索引为1的描述符
");
printf("
");
printf("4. 页面错误错误码格式:
");
printf(" Bit 0: P - 存在标志 (0=页不存在, 1=页保护违规)
");
printf(" Bit 1: W/R - 读/写标志 (0=读, 1=写)
");
printf(" Bit 2: U/S - 用户/超级用户标志 (0=内核模式, 1=用户模式)
");
printf(" Bit 3: RSVD - 保留位设置 (0=非保留位, 1=保留位)
");
printf(" Bit 4: I/D - 指令获取标志 (0=数据访问, 1=指令获取)
");
printf(" 示例: 0x0006 = 用户模式写入访问违规
");
}
// 演示页面错误处理流程
void demonstratePageFaultHandling() {
printf("
页面错误处理流程:
");
printf("=============
");
printf("1. 缺页错误处理 (P=0):
");
printf(" a) 检查导致错误的地址 (CR2寄存器)
");
printf(" b) 验证地址是否在进程的有效虚拟地址空间内
");
printf(" c) 如果有效:
");
printf(" - 分配物理页框
");
printf(" - 如果是文件映射,从文件加载内容
");
printf(" - 如果是匿名映射,清零内存
");
printf(" - 更新页表,设置相应权限
");
printf(" - 刷新TLB (通常通过写CR3)
");
printf(" - 返回到引起异常的指令重试
");
printf(" d) 如果无效:
");
printf(" - 发送SIGSEGV信号给进程
");
printf(" - 通常导致进程终止
");
printf("
");
printf("2. 写保护违规处理 (P=1, W/R=1):
");
printf(" a) 检查是否为写时复制情况
");
printf(" - 多个进程共享同一只读物理页面
");
printf(" - 当进程尝试写入时触发异常
");
printf(" b) 如果是写时复制:
");
printf(" - 分配新物理页框
");
printf(" - 复制原页内容到新页
");
printf(" - 更新进程页表,将新页标记为可写
");
printf(" - 返回到引起异常的指令重试
");
printf(" c) 如果是真正的保护违规:
");
printf(" - 发送SIGSEGV信号给进程
");
printf("
");
printf("3. 其他保护违规 (权限不足等):
");
printf(" - 通常表示程序错误或恶意行为
");
printf(" - 发送SIGSEGV信号给进程
");
printf(" - 在调试模式下可能产生核心转储
");
printf("
");
printf("4. 内核页错误处理:
");
printf(" - 内核页错误通常是严重错误
");
printf(" - 一些可恢复情况:
");
printf(" * 内核栈增长
");
printf(" * 预取指令的边界情况
");
printf(" - 不可恢复情况导致内核恐慌(panic)
");
printf(" * 记录错误信息
");
printf(" * 可能尝试核心转储
");
printf(" * 重启系统
");
}
// 演示保护模式异常的系统意义
void explainExceptionSystemSignificance() {
printf("
异常在系统中的关键作用:
");
printf("================
");
printf("1. 虚拟内存实现:
");
printf(" - 页面错误处理是按需分页的基础
");
printf(" - 支持内存映射、写时复制、写时分配等技术
");
printf(" - 允许系统提供远大于物理内存的地址空间
");
printf("
");
printf("2. 内存保护机制:
");
printf(" - 防止进程访问其他进程的内存
");
printf(" - 防止用户程序修改关键系统内存
");
printf(" - 实现只读代码段,防止代码被修改
");
printf("
");
printf("3. 调试支持:
");
printf(" - 断点和单步执行异常支持调试器功能
");
printf(" - 允许调试器监控和控制程序执行
");
printf(" - 提供硬件级调试辅助
");
printf("
");
printf("4. 指令扩展机制:
");
printf(" - 无效操作码异常允许模拟未实现的指令
");
printf(" - 支持浮点协处理器模拟和虚拟化
");
printf(" - 提供硬件扩展的兼容性层
");
printf("
");
printf("5. 系统稳定性和可靠性:
");
printf(" - 捕获错误并防止其传播
");
printf(" - 提供错误恢复机制
");
printf(" - 隔离故障程序,防止系统崩溃
");
printf("
");
printf("6. 系统调用实现:
");
printf(" - 通过INT指令触发陷阱,实现用户-内核转换
");
printf(" - 提供安全、受控的系统服务访问
");
printf(" - 现代系统使用SYSENTER/SYSCALL和快速系统调用
");
}
// 模拟异常场景
void simulateExceptionScenarios() {
printf("
模拟异常场景:
");
printf("===========
");
// 场景1: 除零错误
printf("
场景1: 除零错误
");
printf("代码: int result = 10 / 0;
");
cpuState.eip = 0x10001000;
handleException(EXC_DIVIDE_ERROR, 0, 0);
// 场景2: 页面不存在
printf("
场景2: 缺页错误 (访问未映射内存)
");
printf("代码: int value = *(int*)0x50000000;
");
cpuState.eip = 0x10002000;
handleException(EXC_PAGE_FAULT, 0x0, 0x50000000);
// 场景3: 页保护违规
printf("
场景3: 页保护违规 (写入只读内存)
");
printf("代码: *(int*)0x08049000 = 42; // 写入代码段
");
cpuState.eip = 0x10003000;
handleException(EXC_PAGE_FAULT, 0x2, 0x08049000);
// 场景4: 写时复制
printf("
场景4: 写时复制场景
");
printf("代码: buffer[0] = 'X'; // 写入COW页
");
cpuState.eip = 0x10004000;
handleException(EXC_PAGE_FAULT, 0x3, 0x20000000);
// 场景5: 一般保护错误
printf("
场景5: 一般保护错误 (特权指令)
");
printf("代码: __asm__ volatile("cli"); // 用户模式尝试禁用中断
");
cpuState.eip = 0x10005000;
cpuState.inKernelMode = false; // 临时设置为用户模式
handleException(EXC_GENERAL_PROTECTION, 0x0, 0);
cpuState.inKernelMode = true; // 恢复内核模式
// 场景6: 断点
printf("
场景6: 断点异常
");
printf("代码: __asm__ volatile("int3"); // 断点指令
");
cpuState.eip = 0x10006000;
handleException(EXC_BREAKPOINT, 0, 0);
// 场景7: 无效操作码
printf("
场景7: 无效操作码
");
printf("代码: __asm__ volatile(".byte 0x0F, 0xFF"); // 无效指令
");
cpuState.eip = 0x10007000;
handleException(EXC_INVALID_OPCODE, 0, 0);
// 场景8: 双重故障
printf("
场景8: 双重故障场景
");
printf("情景: 页错误处理程序本身发生页错误
");
cpuState.eip = 0x10008000;
handleException(EXC_DOUBLE_FAULT, 0, 0);
}
int main() {
printf("32位微处理器的异常处理机制
");
printf("======================
");
printf("异常是处理器在执行程序时检测到的特殊条件,它会打断正常的指令流并触发相应的
");
printf("处理程序。异常处理机制
printf("处理程序。异常处理机制允许操作系统识别和应对各种错误条件和特殊情况。
");
// 初始化CPU状态
initializeCpuState();
// 解释异常处理类型的区别
explainExceptionHandlerTypes();
// 解释错误码
explainErrorCodes();
// 演示页面错误处理
demonstratePageFaultHandling();
// 解释异常的系统意义
explainExceptionSystemSignificance();
// 模拟异常场景
simulateExceptionScenarios();
return 0;
}32位微处理器的异常处理机制是处理器保护和错误管理系统的核心部分,它允许CPU检测和处理执行过程中的各种特殊情况。不同于中断处理(主要处理外部事件),异常处理专注于处理程序执行中的内部异常条件,如除零错误、非法指令、内存访问违规等。
异常的基本概念
异常是处理器在执行指令时检测到的特殊条件,它会导致当前指令流被暂停,转而执行预定义的异常处理程序。异常可以分为三种基本类型:
故障(Fault):可恢复的错误,异常处理后返回到导致异常的指令重新执行陷阱(Trap):在指令执行后报告,异常处理后返回到下一条指令终止(Abort):严重错误,通常不提供精确的异常位置,可能无法恢复
x86异常类型
32位x86架构定义了多种异常类型,每种对应一个异常向量(0-31):
故障类异常
除零错误(#DE, 0):尝试执行除法但除数为0调试异常(#DB, 1):由调试条件(如单步执行)触发无效操作码(#UD, 6):CPU无法识别的指令段不存在(#NP, 11):尝试加载不存在的段栈段故障(#SS, 12):栈操作违反段界限或权限一般保护(#GP, 13):段级保护机制检测到的违规页面错误(#PF, 14):页面级保护违规或页面不存在对齐检查(#AC, 17):未对齐内存访问(当启用时)
陷阱类异常
断点(#BP, 3):执行INT 3指令溢出(#OF, 4):执行INTO指令时OF标志被设置
终止类异常
双重故障(#DF, 8):异常处理程序本身产生异常机器检查(#MC, 18):硬件检测到内部错误或总线错误
异常处理机制详解
1. 异常触发过程
当异常发生时,CPU执行以下步骤:
完成当前指令(对于故障,指令可能未完成)保存执行上下文:
EFLAGS, CS, EIP压入栈如果发生特权级转换,SS和ESP也被保存某些异常会生成错误码并压入栈
查找处理程序:
通过异常向量在IDT中找到相应的描述符加载处理程序地址到CS:EIP
执行异常处理程序
2. 错误码
某些异常会生成错误码提供额外信息:
一般保护、段相关异常:错误码指明涉及的段选择子页面错误:错误码指明具体的访问类型和错误原因
页面错误错误码格式:
Bit 0 (P):0=页不存在,1=访问权限违规Bit 1 (W/R):0=读操作,1=写操作Bit 2 (U/S):0=内核模式访问,1=用户模式访问Bit 3 (RSVD):0=非保留位问题,1=保留位被设置Bit 4 (I/D):0=数据访问,1=指令获取
3. CR2寄存器
页面错误异常特有的功能:CR2寄存器自动保存导致异常的内存地址,使处理程序能精确定位问题位置。
重要异常处理实例
1. 页面错误处理
页面错误是最复杂也是最常见的异常之一,它支持以下关键功能:
缺页错误处理(P=0):
验证访问地址是否在进程的合法虚拟地址空间如果合法,分配物理页框,加载内容,更新页表如果非法,向进程发送SIGSEGV信号
写保护违规(P=1, W/R=1):
可能是写时复制(COW)情况创建页面副本,更新页表使其可写如是真正的保护违规,发送SIGSEGV信号
2. 一般保护错误处理
一般保护错误通常表明程序尝试执行特权操作或访问非法内存:
检查错误码确定原因大多数情况下向进程发送SIGSEGV信号在用户程序中通常是致命错误
3. 断点异常处理
断点异常用于支持调试:
保存所有寄存器状态供调试器检查通知调试器断点被触发调试器可以检查/修改内存和寄存器支持程序单步执行
异常在系统中的关键作用
1. 虚拟内存实现
页面错误处理是按需分页的基础支持内存映射、写时复制、写时分配等技术实现物理内存和虚拟内存的动态映射
2. 内存保护
防止进程访问其他进程内存隔离用户空间和内核空间实现只读代码段,防止代码被修改
3. 指令集扩展
无效操作码异常允许模拟未实现指令设备不可用异常支持协处理器模拟提供硬件虚拟化的基础
4. 调试支持
断点和单步执行异常使调试器工作提供硬件级调试辅助支持程序行为分析和错误诊断
5. 系统调用实现
早期系统使用INT指令触发异常实现系统调用提供用户态和内核态之间的安全转换
异常与中断的区别
虽然异常和中断使用相同的基础机制(IDT),但有关键区别:
来源:
异常:CPU内部生成,与当前执行指令相关中断:外部设备或软件INT指令生成
同步/异步:
异常:同步,总是与特定指令执行相关中断:异步,可以在任何指令之间发生
处理后返回点:
异常:根据类型,返回到触发异常的指令或下一条指令中断:总是返回到下一条指令
异常处理机制是保护模式处理器的关键功能,为操作系统提供了必要的错误检测和恢复能力,也是实现内存保护、虚拟内存和调试支持的基础。通过这种机制,系统能够有效管理硬件资源,提供稳定可靠的执行环境。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...








![[理论篇-10]AI 工作流(AI Workflow)—— 让 AI 像流水线一样干活](https://www.dunling.com/img/6.jpg)

