PanoCar软件介绍
车辆动力学模型与软件在车辆设计和开发过程中发挥着至关重要的作用,更是汽车电动化和智能化仿真测试不可或缺的重要工具。它对于预测车辆性能、优化车辆设计、提升行驶安全性与舒适度,减少能耗并满足环保要求,以及提高研发效率、降低成本等都具有重要的意义。
PanoCar作为一款自主研发的高精度、功能强大的车辆动力学仿真软件,不仅集成了复杂且精确的车辆动力学模型,而且还具备高效率仿真和高稳定性数值计算等特征,可在包括Windows/Linux等操作系统、NI、LinksBox等各类实时硬件平台,以及Matlab/Simulink等各种软件环境下满足大规模、长周期、稳定可靠的实时仿真需求,与国际主流车辆动力学仿真软件CarSim高度兼容且高度一致。
PanoCar以其精确的车辆模型、卓越的仿真性能、友好的操作体验和高度的可扩展性,赋能电动汽车和自动驾驶的仿真测试!

1) 车辆动力学模型简介
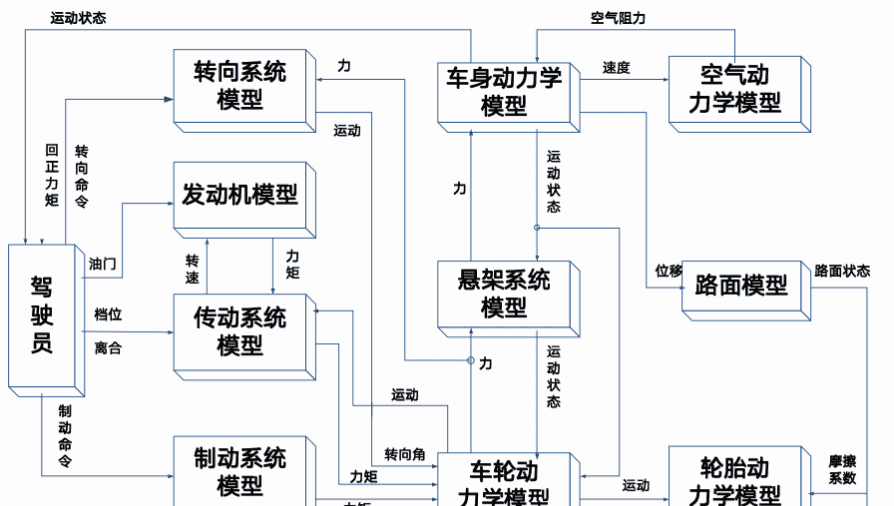
PanoCar集成了复杂的车辆动力学模型,可精确模拟车辆在各种道路和驾驶条件下的动态响应,包括不同路面状况、驾驶输入以及车辆系统之间的相互作用。无论是急加速、紧急制动还是高速转弯,PanoCar都能精确地捕捉车辆的瞬态和稳态运动特性,提供全面而深入的车辆性能分析:
车身动力学和车轮动力学模型;
燃油动力传动系统模型:包括发动机模型、燃油消耗量模型、液力变矩器、自动变速器、分动器、差速器建模;支持前驱、后驱和四驱等各种动力驱动构型;
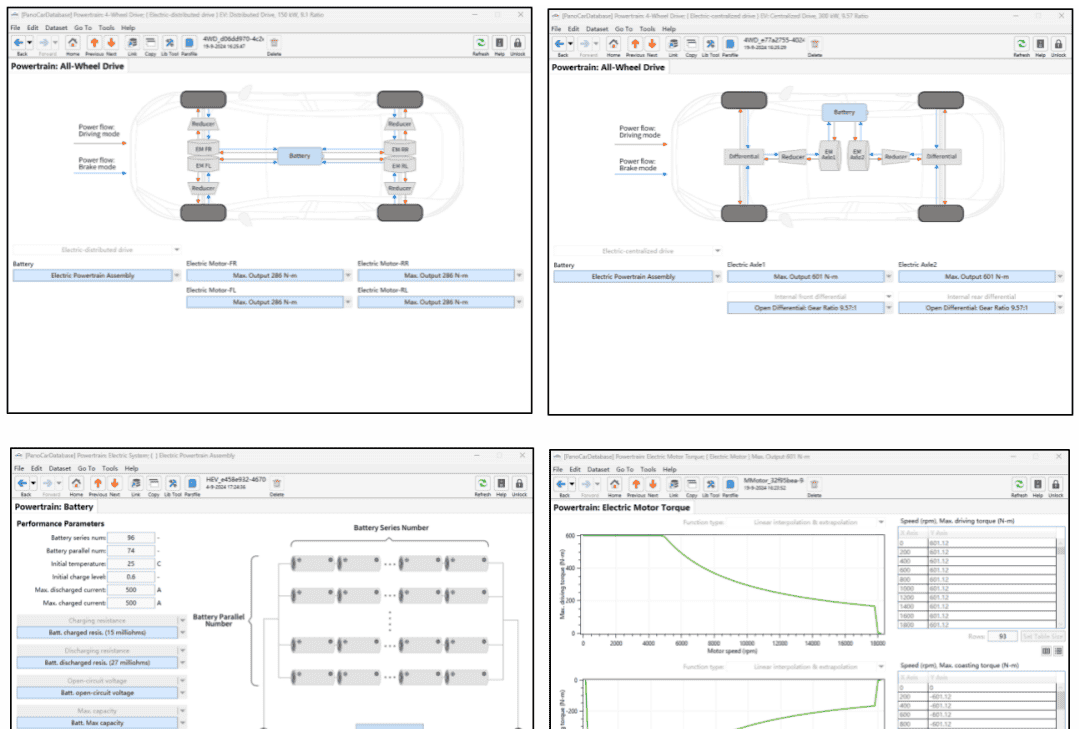
电驱动系统模型:包括电池模型、电机模型、电机效率模型、再生制动能量回收建模,支持前驱双电机、前驱单电机、后驱双电机、后驱单电机、四驱四电机、四驱双电机等分布式和集中式电驱动构型;
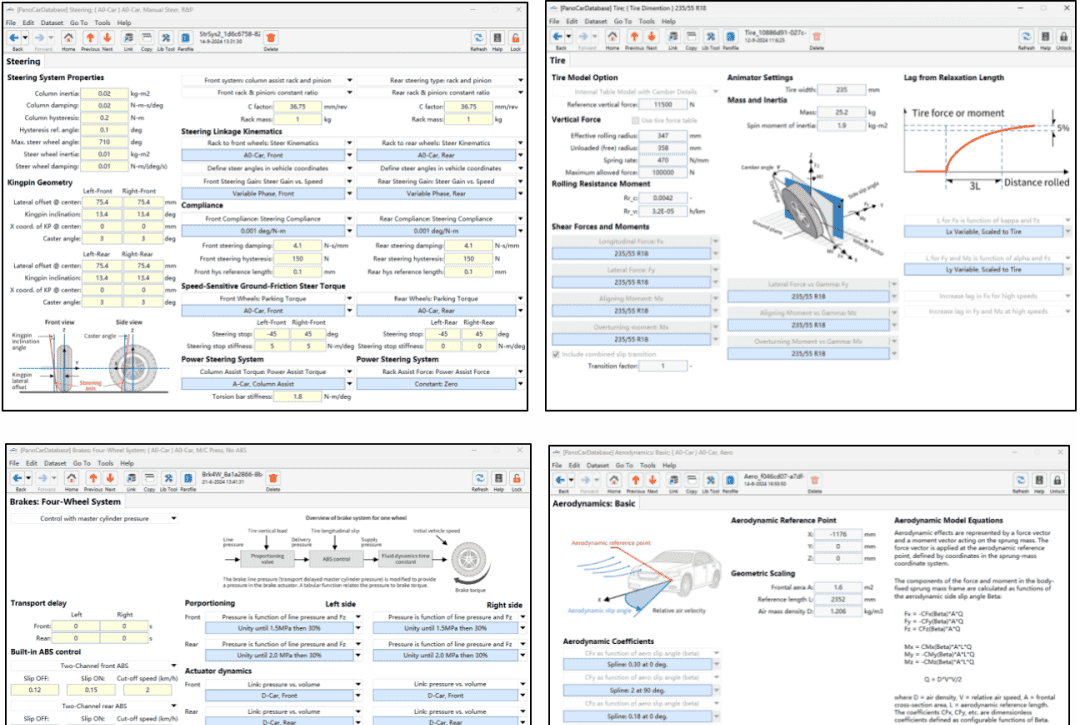
转向系统模型:包括转向管柱、电动助力、齿轮齿条式转向器、转向主销、转向轮等典型转向系统的多刚体动力学建模,包括方向盘转角与扭矩两种控制输入模式,以及后轮转向系统模型;
悬架系统模型:支持非线性弹簧力、阻尼力、上限位块和下限位块约束力等独立悬架力特性元件配置建模,以及悬架系统的非线性运动学特性(Kinematic)和弹性特性(Compliance)配置建模;
制动系统模型:支持包括制动主缸压力、制动轮缸压力、制动热衰退等在内的典型制动系统建模,支持典型制动防抱死(ABS)控制系统等;
驾驶员模型:支持闭环速度和路径跟随控制,支持变速箱挡位自动控制,支持方向盘转角与扭矩控制;
3D道路路面模型:支持典型的基于X-Y坐标和S-L曲线坐标间的相互转换、基于S-L坐标的3D道路及其路面附着系数、滚动阻力系数等建模;
空气动力学模型:支持三维空间空气阻力、升力、侧向力和力矩等建模;
轮胎动力学模型:支持纵侧向复合行驶工况下轮胎力、轮胎弹性迟滞特性、低速行驶工况的建模,支持轮胎滚动阻力矩与功率平衡特性、以及轮胎力与轮胎压缩量或运动量之间关系的建模。
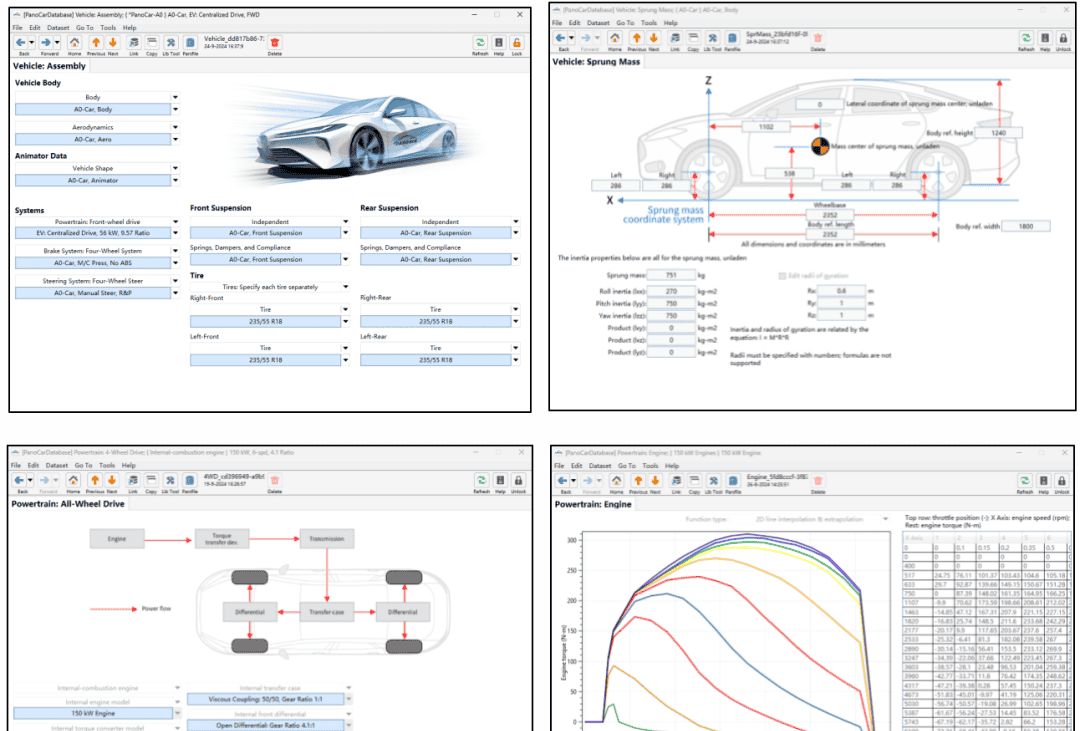
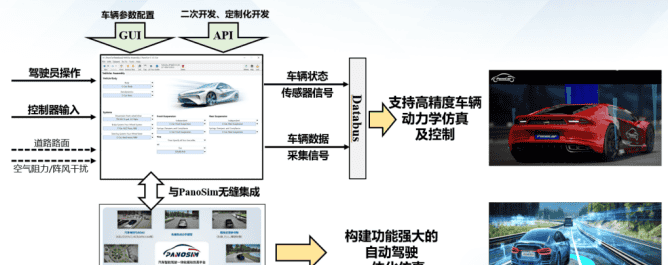
软件界面简介
PanoCar提供直观易用的图形界面,可通过直观的图形、生动的动画或详细的图表形式,快速了解车辆性能特点、发现潜在问题,并进行优化改进,从而全面评估并优化车辆操控稳定性、动力及燃油经济性、驾乘舒适性或运动平顺性等。
PanoCar可根据仿真需求定制车辆模型,包括车辆尺寸、质量分布、悬挂系统特性、轮胎等参数的设置。支持用户自定义参数和扩展功能,可根据需求灵活地调整车辆参数、设置道路条件、配置控制系统等,从而构建精细的仿真工况,以评估不同类型和配置车辆的性能等。
PanoCar软件功能示例
2) I/O接口
PanoCar具备出色的可扩展性和可定制性,其车辆模型拥有丰富的输入输出接口,并附有详细的接口说明文档,支持程序通过I/O读写的方式接入外部算法模型,或者替换车辆子模型(例如:动力传动系统、制动系统、悬架弹簧与阻尼力原件等)。此外,PanoCar还可根据仿真需求进行功能定制和二次开发,以满足不同领域、不同项目的多样化和个性化仿真需求。
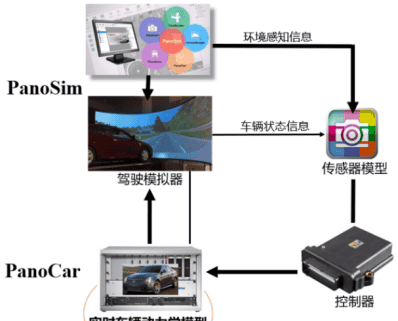
此外,PanoCar还与PanoSim无缝集成,通过友好便捷的图形界面操作,全面支持车辆各类环境传感器选配与安装、各类复杂道路与天气光照设置、交通场景设置、驾驶任务与智能驾驶员配置等,全面支持汽车各种工况和场景下的自动驾驶传感感知与决策规划、运动控制与执行等丰富且强大的仿真功能。
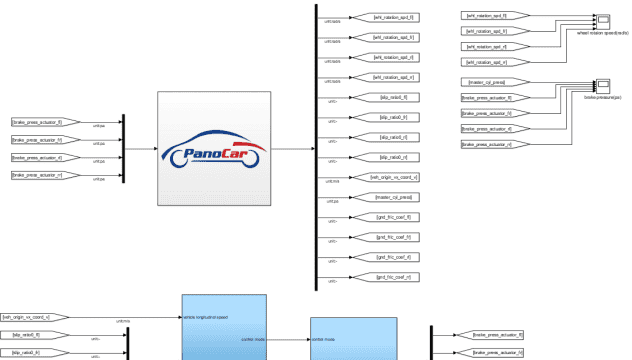
MATLAB/Simulink联合仿真
PanoCar作为一款功能强大的仿真软件,支持与包括Matlab/Simulink等在内的许多工程软件的无缝对接,通过高效、稳定的数据交换和协同仿真,支持与自动驾驶和智能网联等系统的集成与联合仿真。此外,PanoCar还内置丰富的MATLAB/Simulink测试用例模型,可帮助用户快速掌握车辆模型各子系统接口的物理意义与使用方法,部分测试用例如下:
|
Demo |
仿真示例 |
仿真示例说明 |
|
ABS Controller |
制动防抱死控制器 |
该示例可帮助用户了解制动轮缸压力控制的接口及使用方法 |
|
Aerodynamics |
空气动力学模型 |
该示例用于测试环境风对车辆行驶动态的影响,帮助用户了解空气动力学六分力的接口及使用方法 |
|
Driver Model |
驾驶员模型 |
该示例为单点预瞄驾驶员模型,帮助用户了解方向盘输入接口及使用方法,以及如何集成用户自定义的外部车辆侧向控制算法 |
|
Electric Vehicle |
电驱动动力传动系统 |
该示例展示了一个双电机四驱动力传动系统,帮助用户了解如何使用自定义动力传动系统外部模型替换PanoCar默认内置模型 |
|
ESC Controller |
车身电子稳定性控制系统 |
该示例展示了如何根据车身运动状态调节制动轮缸压力大小,以提高车辆侧向运动稳定性,帮助用户了解相关接口及使用方法 |
|
Longitudinal Acceleration Controller |
纵向加速度控制器 |
该示例展示了一个纵向PI控制器,帮助用户了解外部自定义纵向控制器接入、以及将加速与制动控制信号分离并作用于PanoCar |
|
Magic Formula Tire Model |
魔术公式轮胎模型 |
该示例帮助用户了解如何接入外部自定义轮胎模型,以及轮胎六分力的接口及使用方法 |
|
Semi Active Suspension |
半主动悬架系统模型 |
该示例分别展示了一个半主动悬架和主动悬架等外部控制算法在PanoCar车辆模型中的接口及使用方法 |
|
Wave Road |
波浪路模型 |
该示例帮助用户了解如何将车辆动力学模型与外部道路的数据交互(轮胎接地点处的高程坐标、两个方向的导数信息) |
|
OpenCRG Demo |
OpenCRG道路信息导入模型 |
该示例帮助用户了解如何将车辆动力学模型与OpenCRG道路信息数据进行交互(轮胎接地点处的高程坐标、两个方向的导数信息) |
|
VTD Demo |
VTD与PanoCar联合仿真接口模型 |
该示例帮助用户了解如何将车辆动力学模型与VTD进行数据交互 |
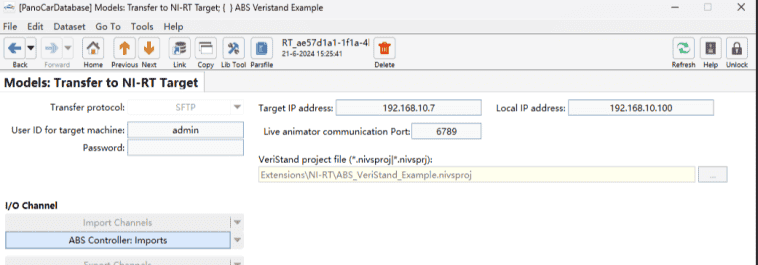
4) 实时仿真(RT版本)
PanoCar具备高效的仿真速度和数值稳定性,可满足大规模、长周期稳定可靠的实时仿真需求。PanoCar可在各类硬件仿真平台上实现1ms数值积分步长的稳定运行,满足各类HIL系统仿真实时性要求。支持包括NI-RT等在内的各种实时仿真平台,提供PanoCar与实时机通讯配置界面,用户可根据需要设置车辆模型与外接模型的输入输出接口、与实时机的通讯协议、通讯地址等。
2. 车辆动力学模型介绍
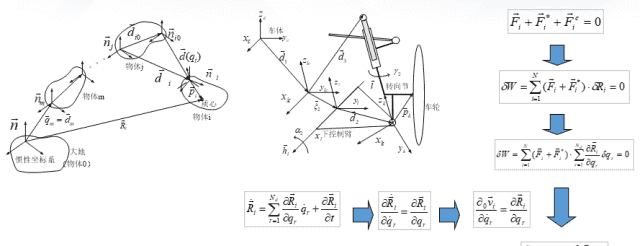
1)车辆动力学建模方法
车辆动力学模型反映给定道路路面、阵风等环境影响下车辆对驾驶员或控制器输入的动态响应,包括车辆的动力性、操纵稳定性和行驶平顺性等。构成车辆动力学的组成因素包括车体(簧上质量)、悬架(弹簧与阻尼器)和轮胎(簧下质量)等,以及转向、动力及传动、制动等系统。车辆动力学建模所遵循的基本物理定律是牛顿第二定律和达朗贝尔原理,其多体动力学建模方法包括牛顿欧拉法、拉格朗日法、凯恩法、哈密尔顿法等,通过构建一组反映车辆受力与运动关系的微分方程研究车辆的动力学特性和动态响应。车辆动力学其建模精度决定了车辆的运动、姿态及轨迹精度,进而直接影响车载传感器的位置和姿态精度,不仅对车辆运动控制、而且对自动驾驶的传感感知及数据融合的准确性均具有重要的影响。
2)车辆坐标系统:
(1)车辆参考坐标系V
该坐标系与簧上质量固连,是所有其他刚体的装配原点,在大地坐标系下观测,其位置在车辆前轴中心至地面的投影点。
(2)轮胎接地点坐标系CP
该坐标系方向由轮胎接地点处的两个偏导数dZ/dX,dZ/dY确定,轮胎力的作用方向依赖于此信息。
(3)车轮坐标系W
该坐标系方向由三个欧拉姿态角,(簧下质量相对于车辆参考坐标系V) 确定。
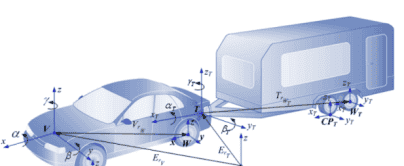
ISO8855:2011标准坐标系
3)主要状态变量
|
模型状态变量 |
自由度 |
|
车身(簧上质量,3个平移速度和3个旋转速度) |
6 |
|
车轮旋转角速度(4个车轮) |
4 |
|
簧下质量(4个)相对于车体的垂向跳动 |
4 |
|
悬架系统的动态弹性特性 (4个簧下质量受力引起的X和Y方向位移与Roll和 Yaw角的二阶动态变化) |
16 |
|
4路油路至轮缸制动系统管路油压的动态迟滞特性 |
4 |
|
4个制动器的转子温度 |
4 |
|
双通道ABS控制器 |
4 |
|
轮胎纵向滑移率与侧偏角的弹性迟滞特性(4个轮胎) |
8 |
|
发动机曲轴转角 |
1 |
|
发动机节气门一阶动态迟滞 |
1 |
|
发动机燃油消耗量 |
1 |
|
液力变矩器输出端与变速器输入端转角 (空挡时,变速器输入端与输出端断开,此时液力变矩器输出端与变速器输入端为一个整体,此自由度存在,否则不存在) |
1 |
|
变速器输出轴转角 |
1 |
|
电驱动系统电机扭矩的动态迟滞特性 (激活电驱动动力传动系统时生效,最多可4个电机同时工作) |
4 |
|
电驱动电池荷电状态(SOC) |
1 |
|
悬架系统摩擦力迟滞特性(4个独立悬架) |
4 |
|
转向系统转角 (扭矩输入模式时为2个自由度,转角输入模式为1个自由度) |
2 |
|
转向系统管柱摩擦阻力矩的动态迟滞特性 |
1 |
|
转向系统横拉杆摩擦力的迟滞特性 |
1 |
|
转向系统管柱助力的迟滞特性 (转向系统管柱助力激活时,此自由度生效) |
1 |
|
转向系统齿条助力的迟滞特性 (转向系统齿条助力激活时,此自由度生效) |
1 |
|
驾驶员模型纵向控制量的一阶迟滞 (加速信号与制动主缸油压信号的一阶迟滞) |
2 |
|
驾驶员侧向控制量的二阶迟滞特性 (方向盘转角控制量的二阶迟滞) |
1 |
|
二自由度动力学参考模型的侧向速度和横摆角速度 (驾驶员路径跟随侧向控制模式激活时,此自由度生效) |
2 |
4) 车辆刚体动力学模型
车辆坐标系下车身动力学包括六个自由度,分别为三个平动和三个转动,包括纵向、侧向和垂向运动,以及横摆、俯仰和侧倾运动。
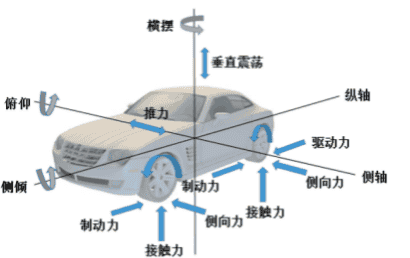
车轮动力学则是在车轮坐标系下包括其各自围绕轮轴旋转构成的四个转动自由度。
5)燃油动力传动系统模型
支持驱动构型(燃油):前驱、后驱与四驱
基于二维表格插值的发动机扭矩计算模型
基于二维表格插值的燃油消耗率计算模型
基于一维表格插值的液力变矩器扭矩计算模型
液力变矩器锁止离合器模型
速敏型中央限滑差速器模型(四驱模式)
速敏型轮间限滑差速器模型(前、后驱模式)
支持用户配置激活差速器锁止离合器
支持用户配置发动机节气门一阶瞬态特性
支持用户配置传动系统的自然频率与阻尼比,用于描述传动系统的柔性特性
支持用户配置自动变速器升挡临界线
支持用户配置自动变速器降挡临界线
支持用户配置自动变速器挡位数(最高18挡)
支持用户配置变速器不同挡位对应的传动比系数
支持用户配置变速器不同挡位对应的转动惯量
支持用户配置变速器不同挡位对应的正反向传动效率
6) 电驱动动力系统模型
支持电驱动构型(纯电):双电机前驱、单电机前驱、双电机后驱、单电机后驱、双电机四驱、四电机四驱
基于等效内阻法(Rint)的一阶电池模型
基于一维表格插值的电机扭矩计算模型
基于二维表格插值的电机效率(机械功率/电功率)计算模型
再生制动能量回收功能
7) 空气动力学模型
车辆模型考虑了外部环境风引起的作用于车体上的力和力矩
作用于空气动力学参考点的三维空气阻力(或气动力)计算模型
作用于空气动力学参考点的三维空气阻力矩(或气动力矩)计算模型
支持用户配置空气动力学阻力系数、升力系数、侧向力系数。
支持用户配置空气动力学侧倾力矩系数、俯仰力矩系数、横摆力矩系数
8) 转向系统模型
支持构型:齿轮齿条式转向器
基于标准多刚体动力学建模方法
支持用户配置主销定位参数
支持用户配置方向盘转角到转向器齿条位移的运动学关系曲线
支持用户配置转向器齿条位移到左、右两侧车轮转角的运动学关系曲线
支持用户配置作用于转向管柱上的迟滞摩擦力矩
支持用户配置转向管柱阻尼系数
支持用户配置转向管柱扭力杆刚度系数
支持用户配置转向轮静态前束角
支持用户配置激活转向管柱助力模式
支持用户配置激活转向齿条助力模式
考虑悬架运动学特性引起的前轮转角
考虑悬架柔性特性引起的前轮转角
9) 悬架系统模型
支持构型:独立悬架(后续版本将支持非独立悬架建模)
支持用户配置非线性弹簧力
支持用户配置非线性阻尼力
支持用户配置非线性上限位块约束力
支持用户配置非线性下限位块约束力
支持用户配置侧倾稳定性附加力矩与阻尼系数
支持用户配置簧下质量侧倾角与轮跳间的非线性运动学关系曲线
支持用户配置簧下质量横摆角与轮跳间的非线性运动学关系曲线
支持用户配置簧下质量俯仰角与轮跳间的非线性运动学关系曲线
支持用户配置簧下质量侧向位移与轮跳间的非线性运动学关系曲线
支持用户配置簧下质量纵向位移与轮跳间的非线性运动学关系曲线
支持用户配置簧下质量侧倾角与轮心纵向力间的非线性柔性特性关系曲线
支持用户配置簧下质量侧倾角与轮心侧向力间的非线性柔性特性关系曲线
支持用户配置簧下质量侧倾角与车轮回正力矩间的非线性柔性特性关系曲线
支持用户配置簧下质量横摆角与轮心纵向力间的非线性柔性特性关系曲线
支持用户配置簧下质量横摆角与车轮回正力矩间的非线性柔性特性关系曲线
支持用户配置簧下质量纵向位移与轮心纵向力间的非线性柔性特性关系曲线
支持用户配置簧下质量侧向位移与轮心侧向力间的非线性柔性特性关系曲线
10) 制动系统模型
支持用户配置制动主缸压力信号纯延时时长
支持用户配置激活制动防抱死控制系统
支持用户配置激活制动轮缸压力无延时计算模式
支持用户配置激活制动轮缸压力一阶延时计算模式
支持用户配置激活制动轮缸压力与油液体积一维非线性表格模式
支持用户配置激活最大有效制动力矩比例系数计算模式
支持用户配置激活最大有效制动力矩一维非线性表格计算模式
支持用户配置激活最大有效制动力矩制动热衰退计算模式
11) 轮胎动力学模型
基于联合工况理论、数据表格形式的半经验轮胎六分力计算模型
稳态、瞬态(轮胎弹性迟滞特性,低速稳定性数值处理)纵滑率计算
稳态、瞬态(轮胎弹性迟滞特性,低速稳定性数值处理)侧偏角计算
考虑轮胎滚动阻力矩与功率平衡特性
支持用户配置轮胎垂向力与轮胎压缩量间的关系曲线
支持用户配置轮胎纵向力与轮胎垂向力和纵滑率间的关系曲线
支持用户配置轮胎侧向力与轮胎垂向力和侧偏角间的关系曲线
支持用户配置轮胎回正力矩与轮胎垂向力和侧偏角间的关系曲线
支持用户配置轮胎侧翻力矩与轮胎垂向力和侧偏角间的关系曲线
考虑车轮外倾角对轮胎侧向力的附加影响
考虑车轮外倾角对轮胎回正力矩的附加影响
考虑车轮外倾角对轮胎侧翻力矩的附加影响
魔术公式轮胎模型
12) 3D道路路面模型
支持用户配置X-Y坐标形式的道路参考线
支持X-Y坐标与S-L曲线坐标间的相互转换
支持用户配置S-L曲线坐标形式的道路高层
支持用户配置S-L曲线坐标形式的路面附着系数
支持用户配置S-L曲线坐标形式的滚动阻力系数
13) 驾驶员模型
支持车辆纵向速度闭环控制(PI控制)
支持车辆挡位闭环控制(前进、空挡和倒车)
支持路径跟踪侧向控制(多点预瞄方法)
支持方向盘转角与扭矩两种控制模式
14) 驾驶操纵模型
纵向控制(加速信号模式1):常量加速信号
纵向控制(加速信号模式2):加速信号与仿真时间一维非线性表格
纵向控制(加速信号模式3):加速信号与车辆S坐标位置一维非线性表格
纵向控制(制动信号模式1):常量制动主缸压力信号
纵向控制(制动信号模式2):制动主缸压力信号与仿真时间一维非线性表格
纵向控制(制动信号模式3):制动主缸压力信号与车辆S坐标位置一维非线性表格
侧向控制(方向盘转角信号模式1):常量方向盘转角信号
侧向控制(方向盘转角信号模式2):方向盘转角信号与仿真时间一维非线性表格
侧向控制(方向盘转角信号模式3):方向盘转角信号与车辆S坐标位置一维非线性表格
侧向控制(方向盘扭矩信号模式 1):常量方向盘扭矩信号
侧向控制(方向盘扭矩信号模式 2):方向盘扭矩信号与仿真时间一维非线性表格
侧向控制(方向盘扭矩信号模式 3):方向盘扭矩信号与车辆S坐标位置一维非线性表格
侧向控制(侧向路径跟踪模式 1):常量侧向路径偏移
侧向控制(侧向路径跟踪模式 2):侧向路径偏移与仿真时间一维非线性表格
侧向控制(侧向路径跟踪模式 3):侧向路径偏移与车辆S坐标位置一维非线性表格
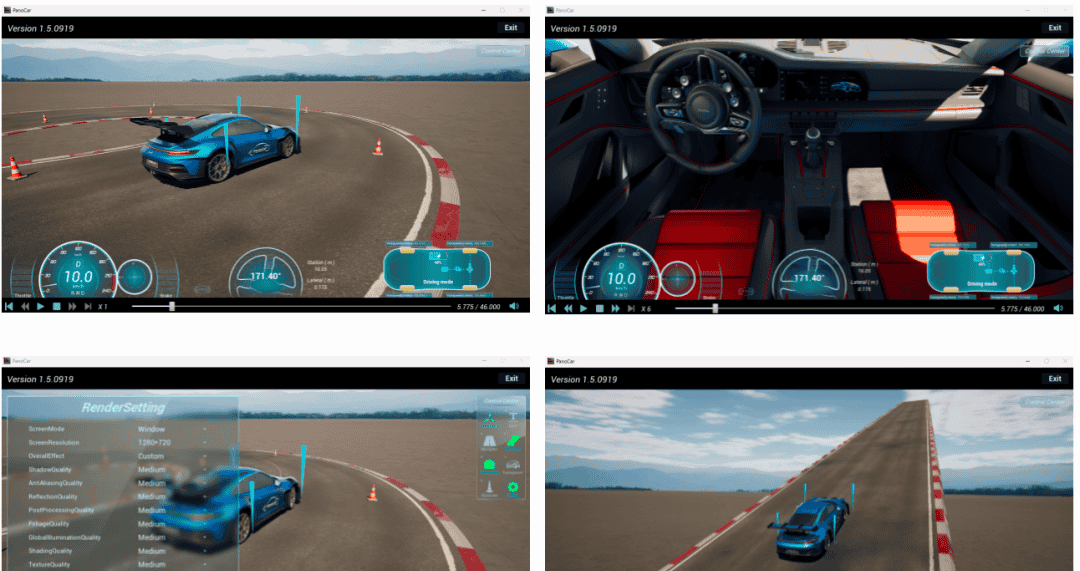
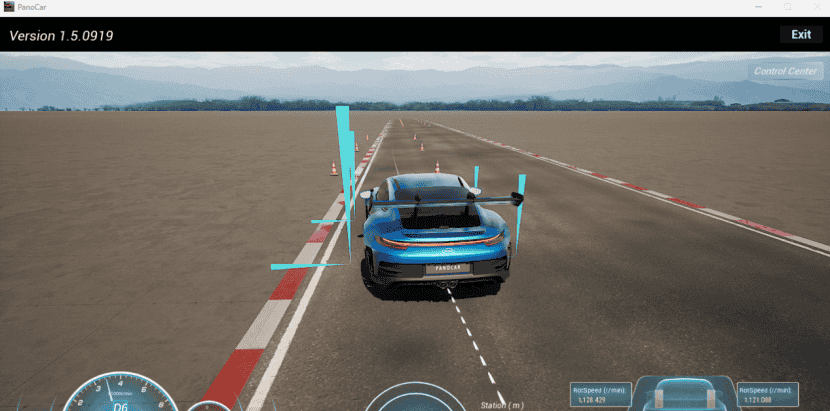
3. 动画引擎
PanoCar仿真数据后处理的图形渲染采用了功能强大的UE引擎,依托UE内置的Lumen全局光照系统实现逼真的画面动态光影与照明,通过Nanite技术结合PBR物理材质,真实还原了车辆外形、路面环境、障碍物以及远景。PanoCar在此基础上二次开发了专为车辆动力学仿真结果演示的动画软件“Animator”,包含便捷的动画播放控制、视角切换、场景呈现、参数显示、动态展示等功能,为精确、逼真地展示车辆动态行驶过程提供了强力的动画支撑。

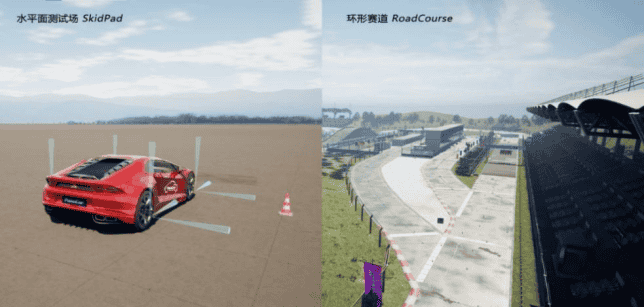
此外,Animator还提供了两类测试场地:
水平面测试场(SkidPad):适合各类典型工况和自定义随意道路与地形的测试需求
环形赛道(RoadCourse):适合连续多路况的综合性集成测试
为最佳化展示车辆动力学的仿真结果,Animator为用户预置了固定视角和跟随视角的观察摄像机位。同时,跟随机位也提供了定焦和变焦两种画面呈现形式。用户可通过自由旋转或推拉镜头位置与角度观察车辆运动,也可通过自动聚焦重点观察点位观察车辆运动。


Animator也支持离线仿真结果的动画播放,包括按钮、快捷键加鼠标等相结合的动画操控方式:
快进:1~8倍速,快速预览动画
慢进:0.02~1倍速,展示动画细节
暂停与播放:画面定格显示
停止播放:重置为初始状态
顺播与倒放:可反复观看某一段动画
进度条:显示当前进度,提供快速跳转

实时动画则由外部输入的车辆动力学仿真数据所驱动,高帧率、低时延地显示实时机的仿真结果。

用户还可以在Animator中通过改变车辆的长宽高、轴距、轮胎半径、厚度、车轮的Toe、Camber角度等配置车辆参数及外形。

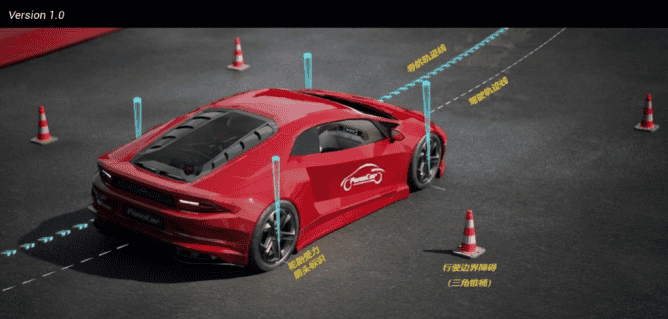
Animator还支持一系列辅助显示,并可通过快捷键切换或关闭显示:
透明车身:用于凸显底盘和轮胎显示
蓝色锥状箭头:轮胎纵向、侧向和垂直三个维度受力指示
蓝色箭头虚线:导航轨迹线
紫色箭头虚线:驾驶轨迹线
三角锥桶:行驶路线的边界障碍物指示
轮胎痕迹:用于体现滑动摩擦率与轮胎纵向压力


Animator还可模拟HUD,显示界面支持的各类参数:
仪表类参数:加速控制信号、发动机转速表盘、车速、变速箱工作档位、G值加速度、制动主缸油压;行驶类参数:方向盘转角、行驶方向路径长度Station、侧向偏移距离Lateral;轮胎类参数:轮胎位置、轮胎转速。
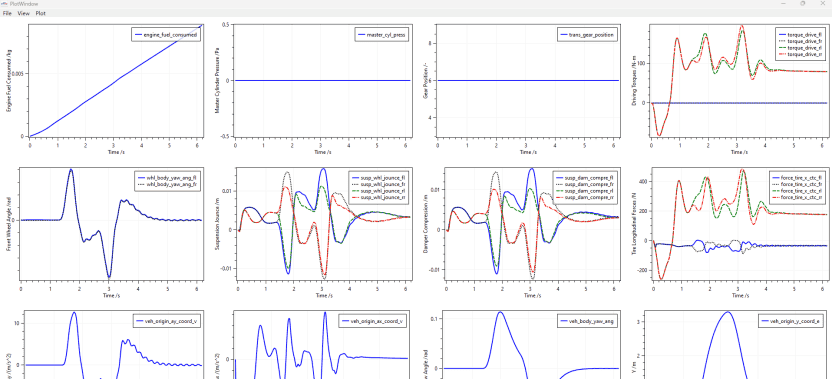
4. 模型验证
本报告选取了典型的C级乘用车为仿真对比测试用车,其发动机功率为150kw,6挡变速箱,差速器差速比4.1:1,四驱(分动箱齿比1:1),齿轮齿条式转向器;仿真测试工况包括加减速、带挡滑行、正弦波转向、方向盘角阶跃、鱼钩(高低附路面)、双移线、蛇形工况等,涵盖了车辆在线性范围和极限工况下的纵向、侧向和纵侧向动力学,并分别与国际主流车辆动力学软件作了全面且严格的一对一比较。
仿真测试结果表明,PanoCar与国际主流车辆动力学软件在模型精度上高度一致。
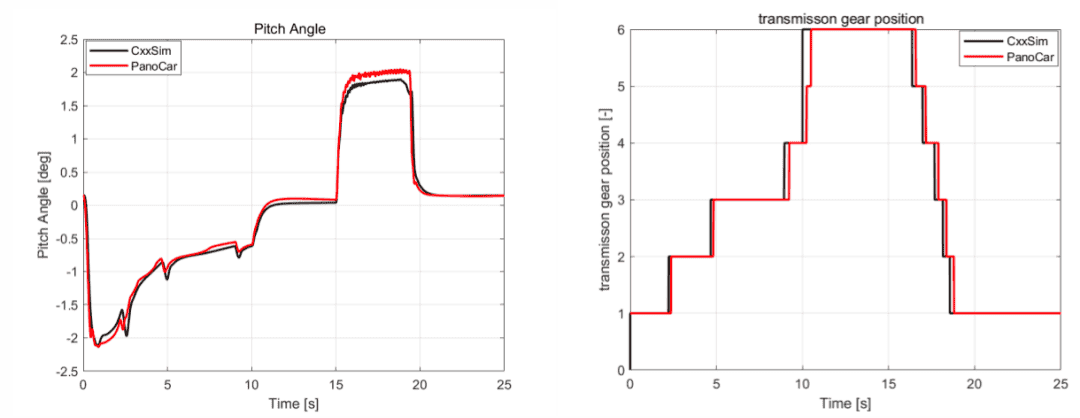
1) 加速减速工况
1】 测试目的:评估车辆的动力总成与制动系统性能、以及极限加减速工况下的纵向动力学性能;
2】测试工况:平坦高附路面(Mu=0.85),初始车速0 (km/h),无转向输入;
3】油门输入:0-10s全油门(100%)加速,制动主缸压力输入:15-25s 10MPa
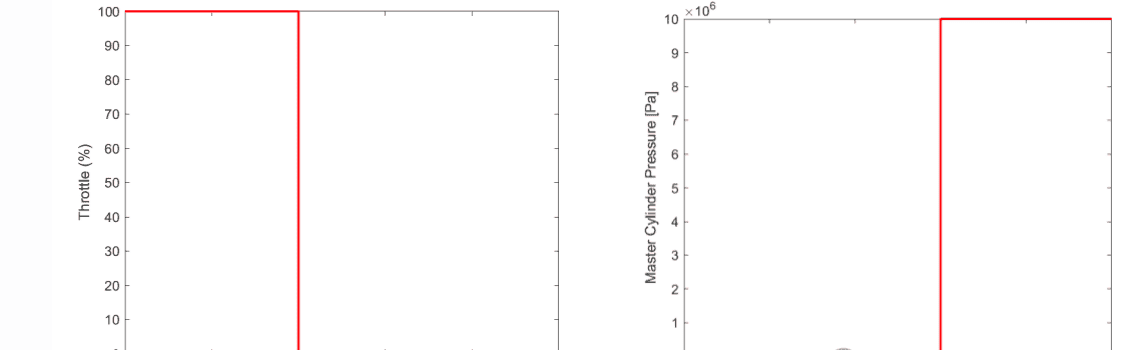
4】测试对比:PanoCar vs. CarSim
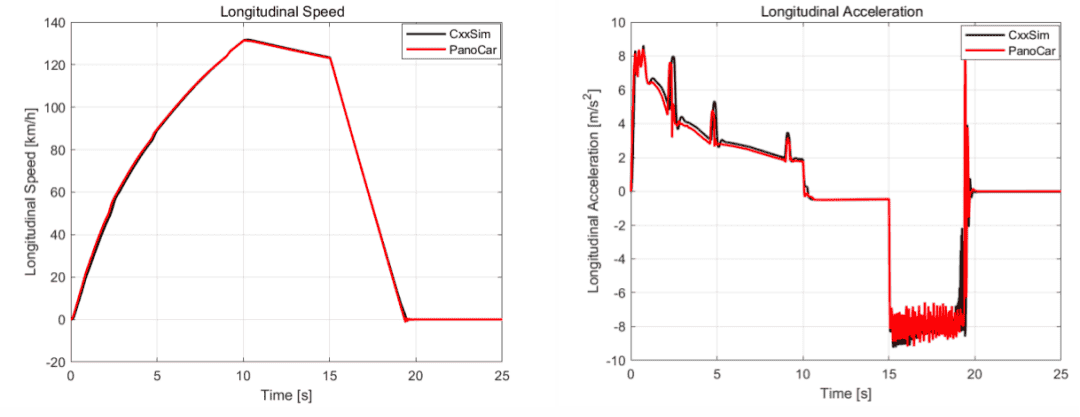
5】仿真测试结果对比
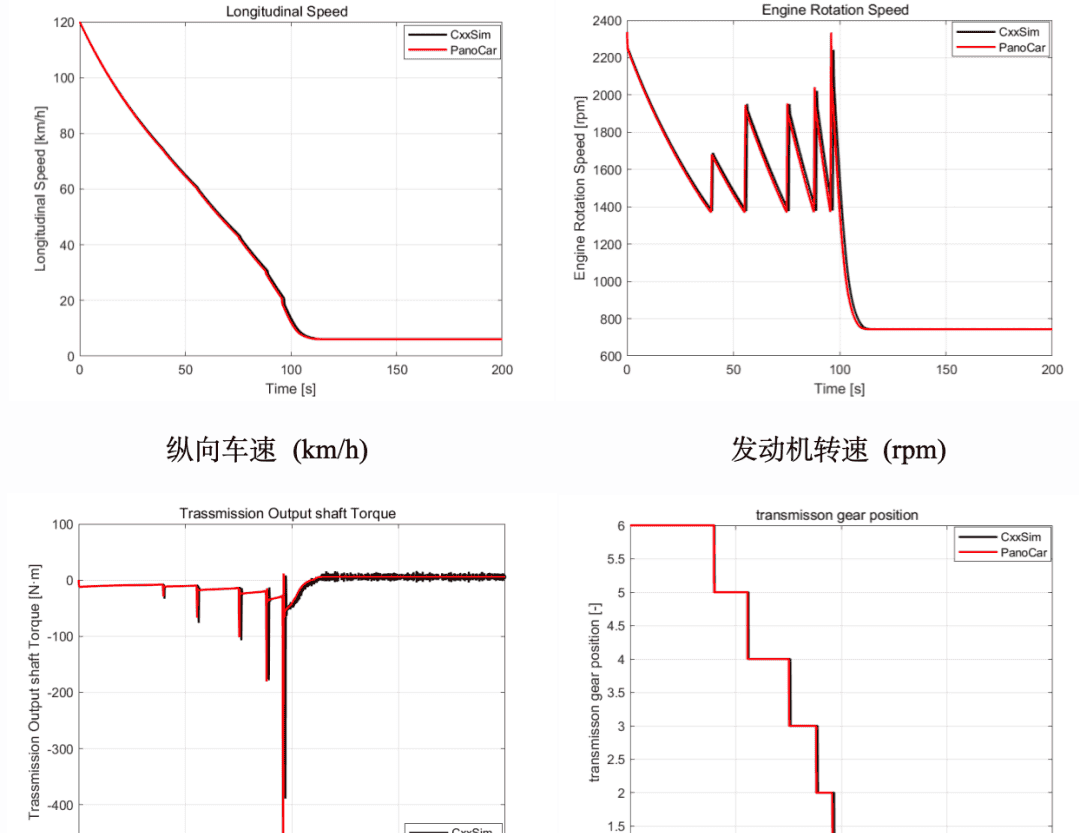
2) 带挡滑行工况
1】测试目的:评估车辆动力传动系统与空气动力学系统的建模精度;
2】测试工况:平坦高附路面(Mu=0.85),初始车速120 (km/h),无油门、制动踏板和方向盘输入;
3】测试对比:PanoCar vs. CarSim
4】仿真测试结果对比
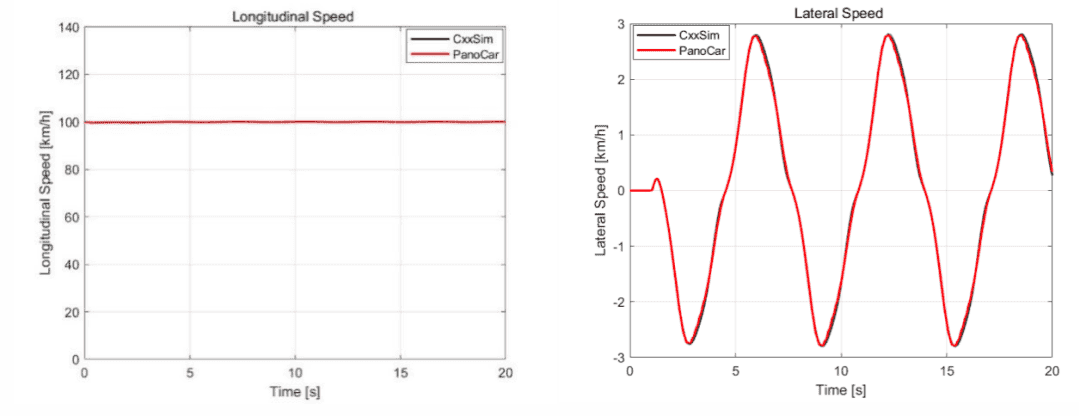
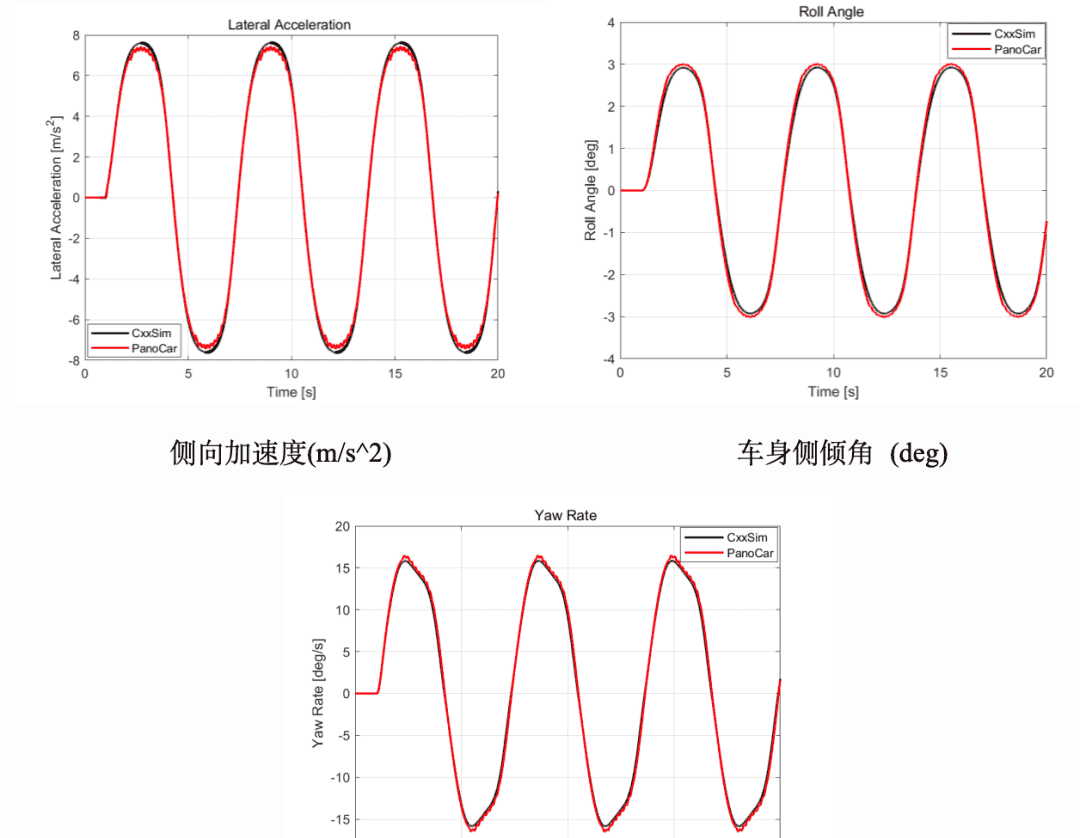
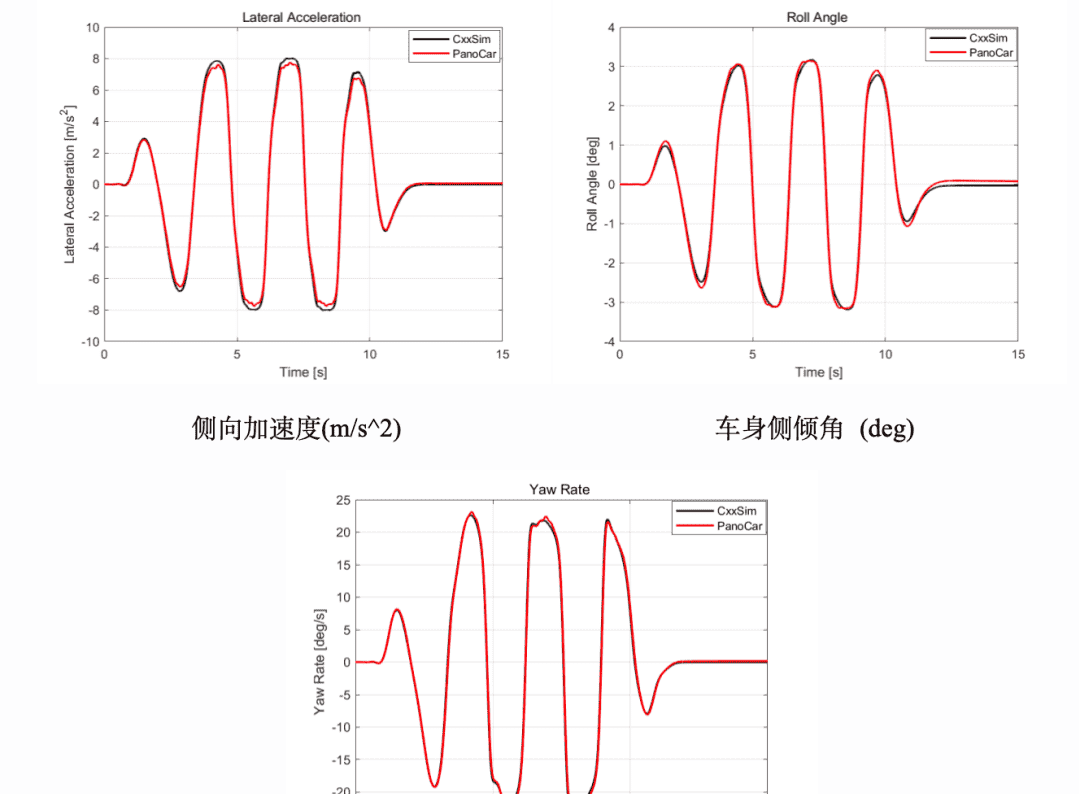
3) 正弦波转向工况
1】 测试目的:评估车辆高速行驶时的操纵稳定性;
2】测试工况:平坦高附路面(Mu=0.85),车速闭环控制、期望车速100 (km/h),方向盘正弦波输入 (±57.3 deg,0.16Hz,如下图所示);
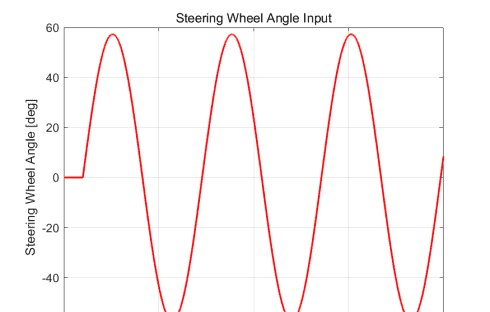
方向盘正弦输入
1】测试对比:PanoCar vs. CarSim
2】仿真测试结果对比
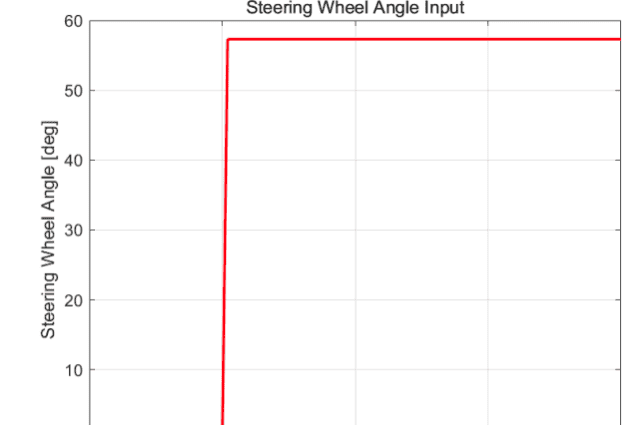
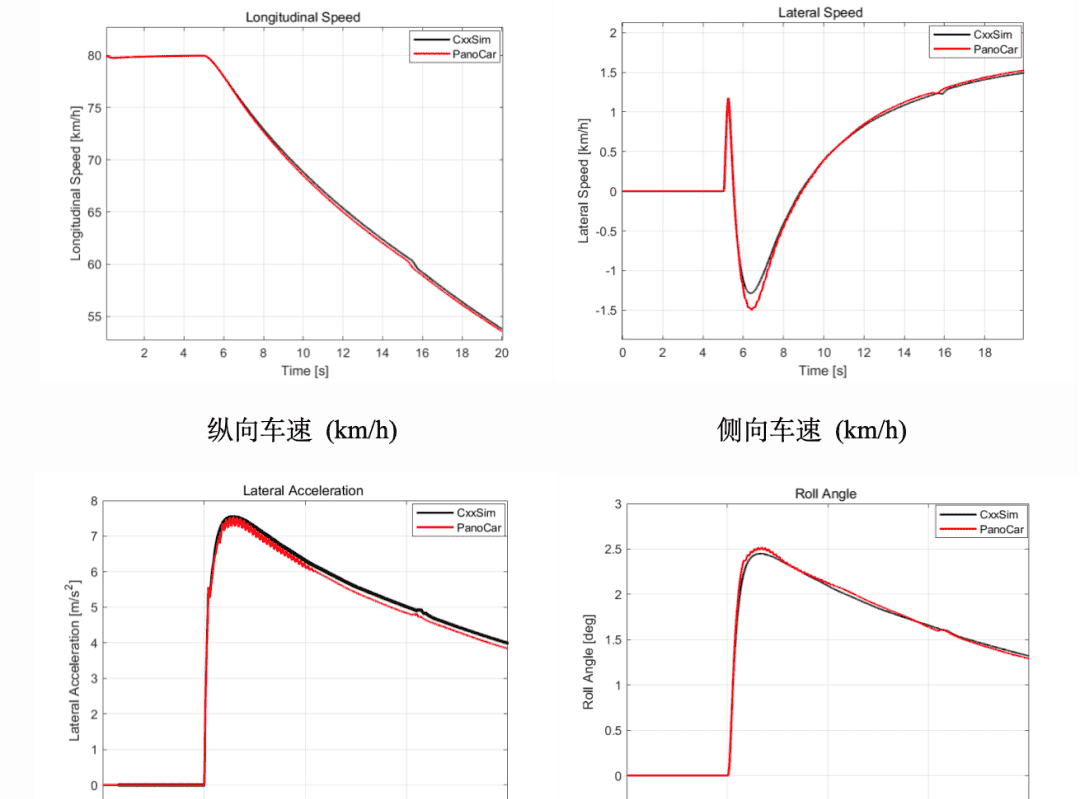
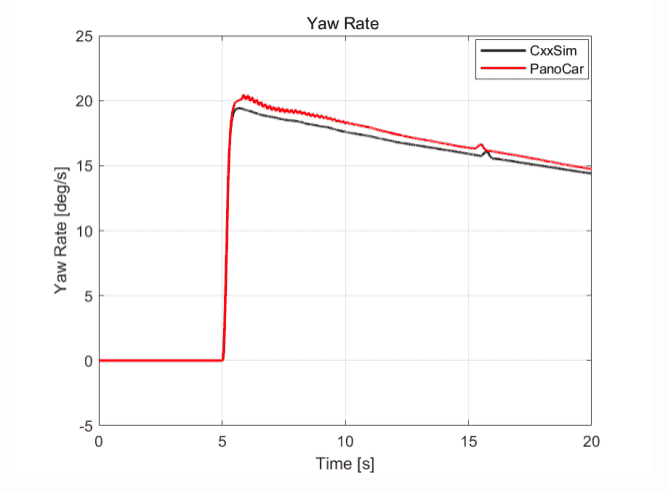
4) 方向盘角阶跃工况
1】测试目的:评估车辆转向响应及侧向动力学性能;
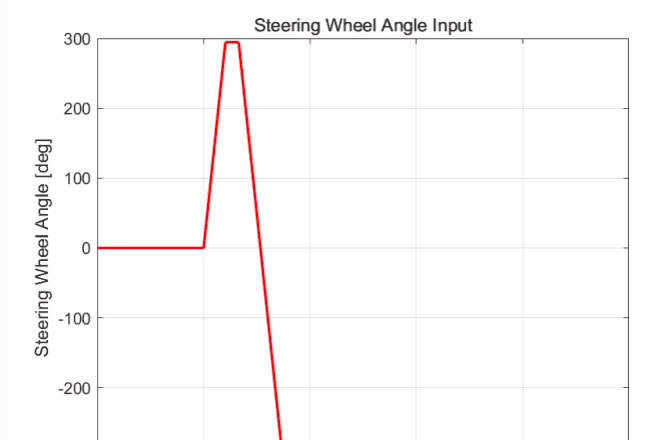
2】测试工况:平坦高附路面(Mu=0.85),初始车速80 (km/h)、无油门和踏板输入,方向盘0.2s内至57.3 deg角阶跃输入如下图所示;
1】测试对比:PanoCar vs. CarSim
2】仿真测试结果对比
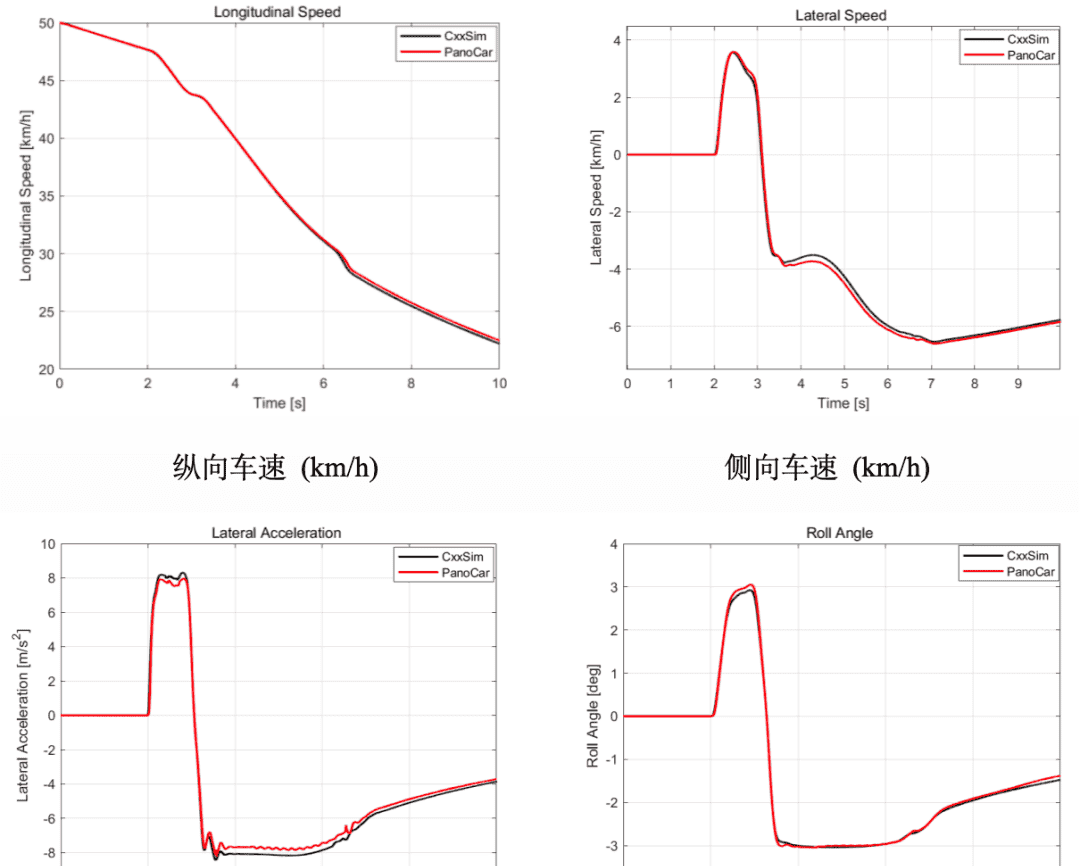
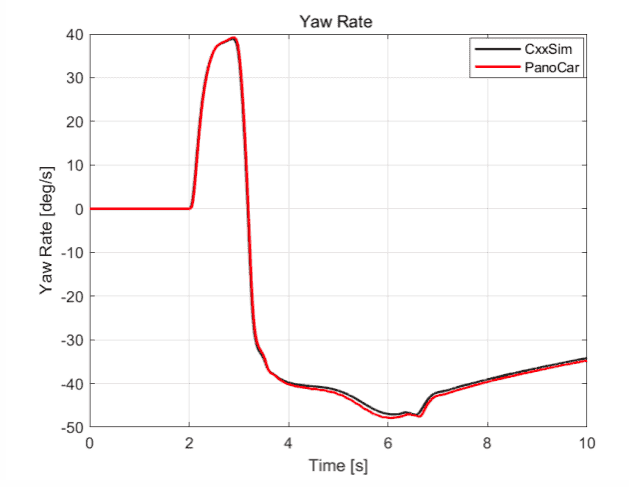
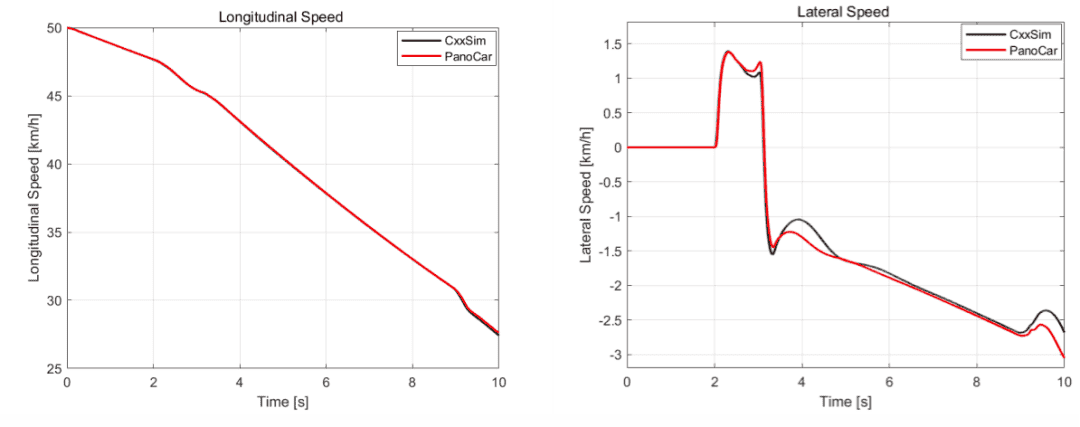
5) 鱼钩工况(Mu=0.85)
测试目的:评估车辆高附路面下的操控稳定性和抗侧翻能力;
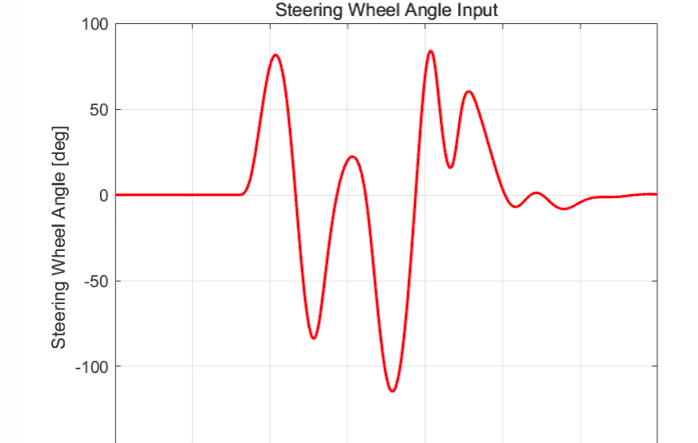
测试工况:平坦高附路面(Mu=0.85),初始车速50 (km/h)、无油门和踏板输入,方向盘转角输入如下图所示;
测试对比:PanoCar vs. CarSim
仿真测试结果对比
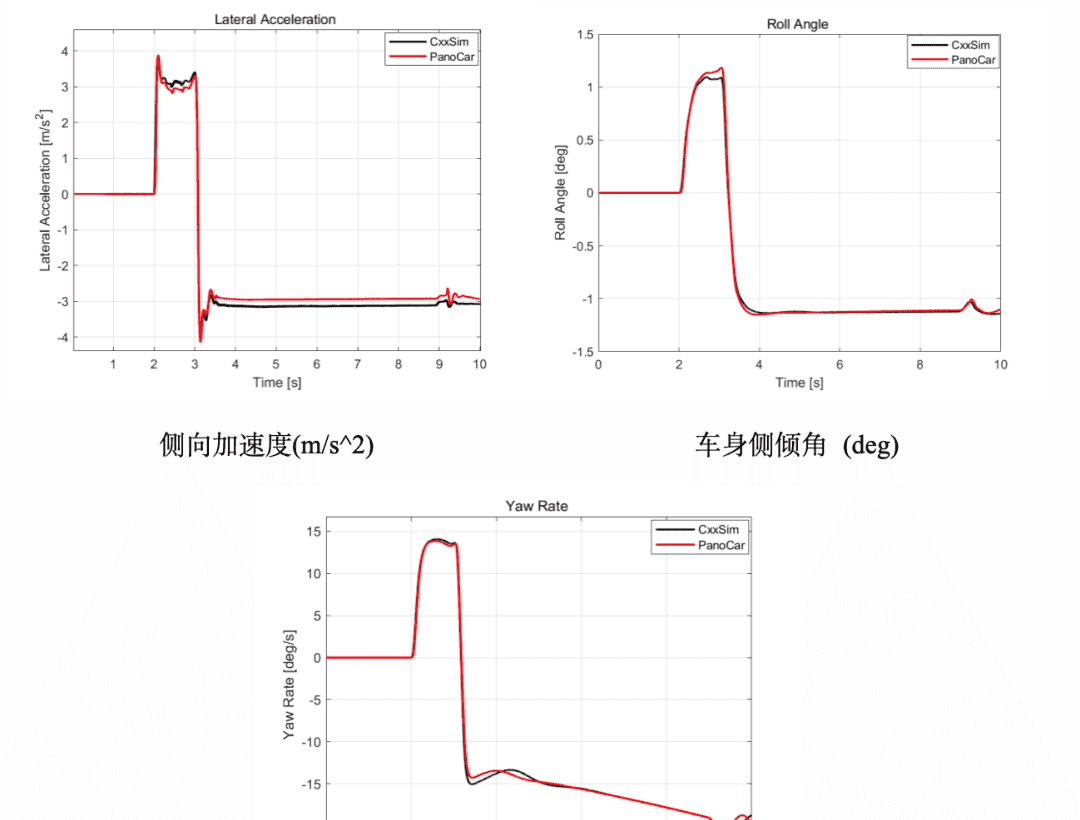
6) 鱼钩工况(Mu=0.35)
1】测试目的:评估车辆低附路面下的操控稳定性和抗侧翻能力;
2】测试工况:平坦低附路面(Mu=0.35),初始车速50 (km/h)、无油门和踏板输入,方向盘转角输入如下图所示;
测试对比:PanoCar vs. CarSim
仿真测试结果对比
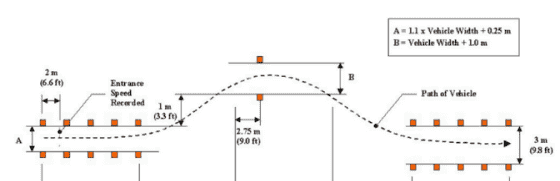
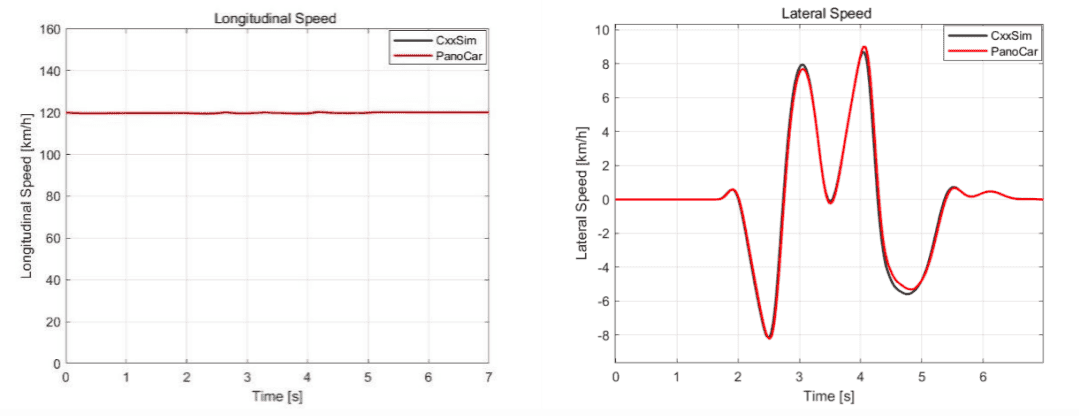
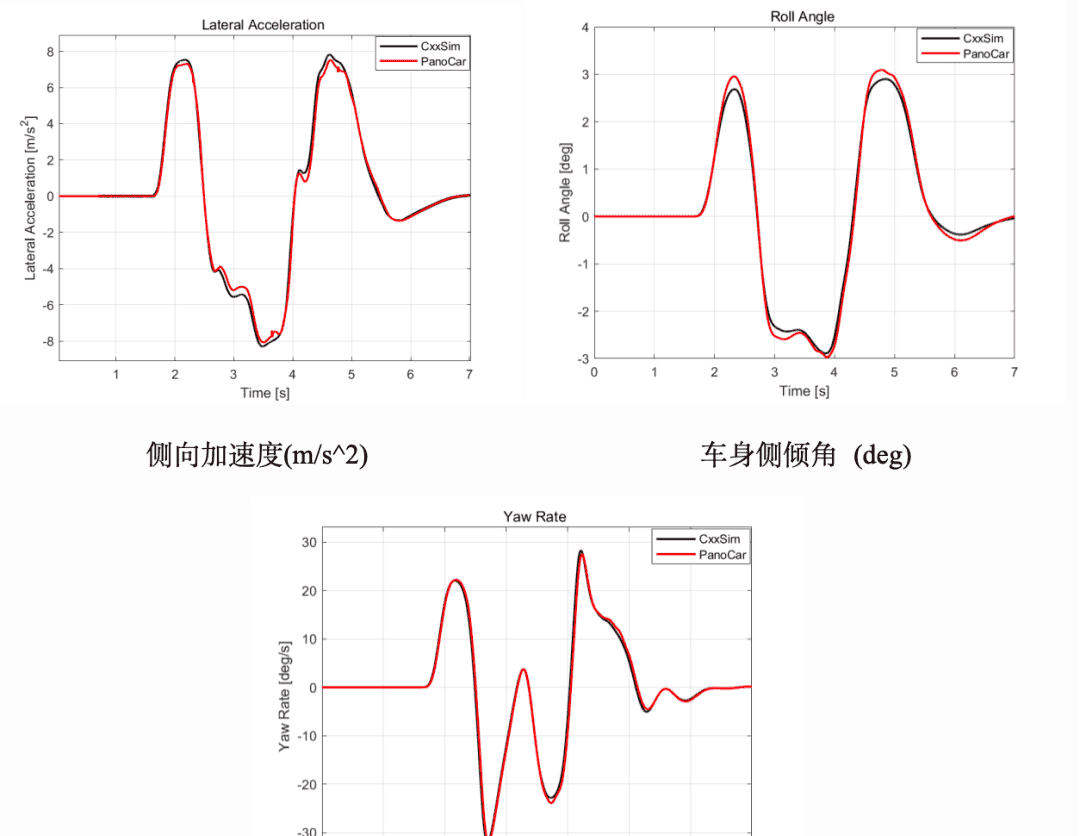
7) 双移线工况
1】测试目的:评估车辆在紧急变道或避障等极限工况下的操控稳定性;
2】测试工况:平坦高附路面(Mu=0.85),车速闭环控制、期望车速120 (km/h),方向盘转角输入如下图所示;
3】测试对比:PanoCar vs. CarSim
4】仿真测试结果对比
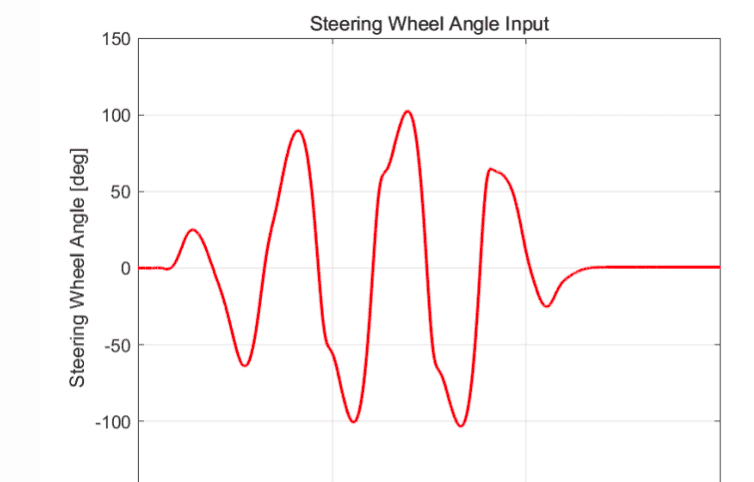
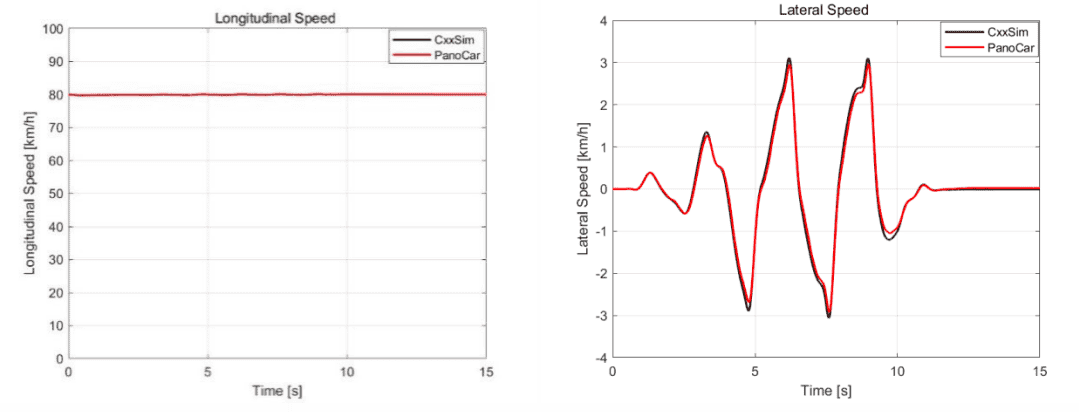
8) 蛇形工况
1】测试目的:评估车辆连续避障时的操控稳定性;
2】测试工况:平坦高附路面(Mu=0.85),车速闭环控制、期望车速80 (km/h),方向盘转角输入如下图所示;
3】测试对比:PanoCar vs. CarSim
4】仿真测试结果对比
公司简介
浙江天行健智能科技有限公司(PanoSim)是国内最早从事汽车自动驾驶仿真技术与产品研发、并拥有完全自主知识产权的国家高新技术企业,也是国家智能网联汽车创新中心、美国MathWorks和俄罗斯国家汽车研究院(NAMI)的战略合作伙伴。公司先后获国家双软认证,入选浙江省“专精特新”企业、浙江省高新技术企业研究开发中心,通过国际标准体系ISO9001/ISO27001/ISO20000认证,并先后荣获“智途奖-年度优秀虚拟仿真系统供应商”、“汽车电子科学技术奖-优秀创新产品奖”和“汽车新供应链百强-金辑奖”,入围“腾讯产业共创营出行赛道高估值明星企业”。以PanoSim 为品牌的系列仿真软硬件产品已在包括美国通用汽车、德国戴姆勒汽车、一汽集团、上汽集团、东风汽车、长安汽车、小鹏汽车、地平线、商泰汽车等在内的国内外企业和科研院所广泛应用并获高度评价,是“中国智能网联汽车算法挑战赛(CIAC)”、“i-VISTA世界虚拟仿真挑战赛”和“世界智能驾驶仿真挑战赛(WIDC)”等国内顶级智能驾驶仿真大赛的官方指定平台(https://www.panosim.com/)。


© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...