
当机器人学会「看」和「说」之后,如何让它们真正拥有「手感」?
含物理交互信息的数据集,将推动机器人在现实世界落地。 今年四月,戴盟机器人联合 Google DeepMind、美国西北大学、新加坡国立大学等全球数十家机构,发布了迄今最大规模的含触觉全模态具身数据集...
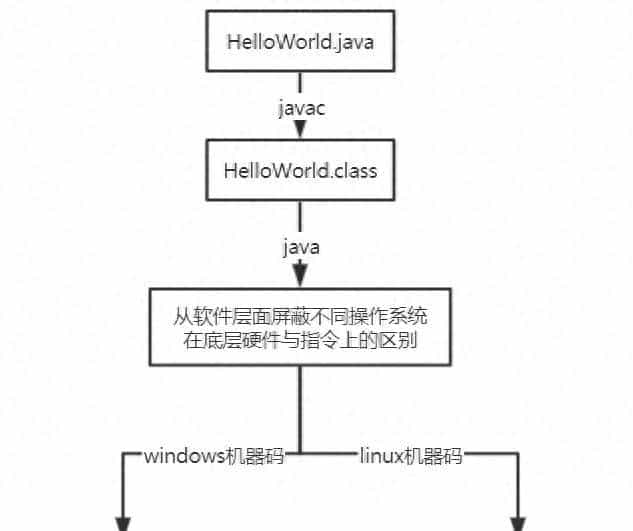
小白都能看得懂的java虚拟机内存模型
来自:CSDN(作者:土豆是我的最爱)原文链接:https://blog.csdn.net/qq_37141773/article/details/103138476#comments一、虚拟机同样的...