基于LOAM框架的3D激光SLAM视频教程,直接拍即可,拍后百度网盘立即自动发货
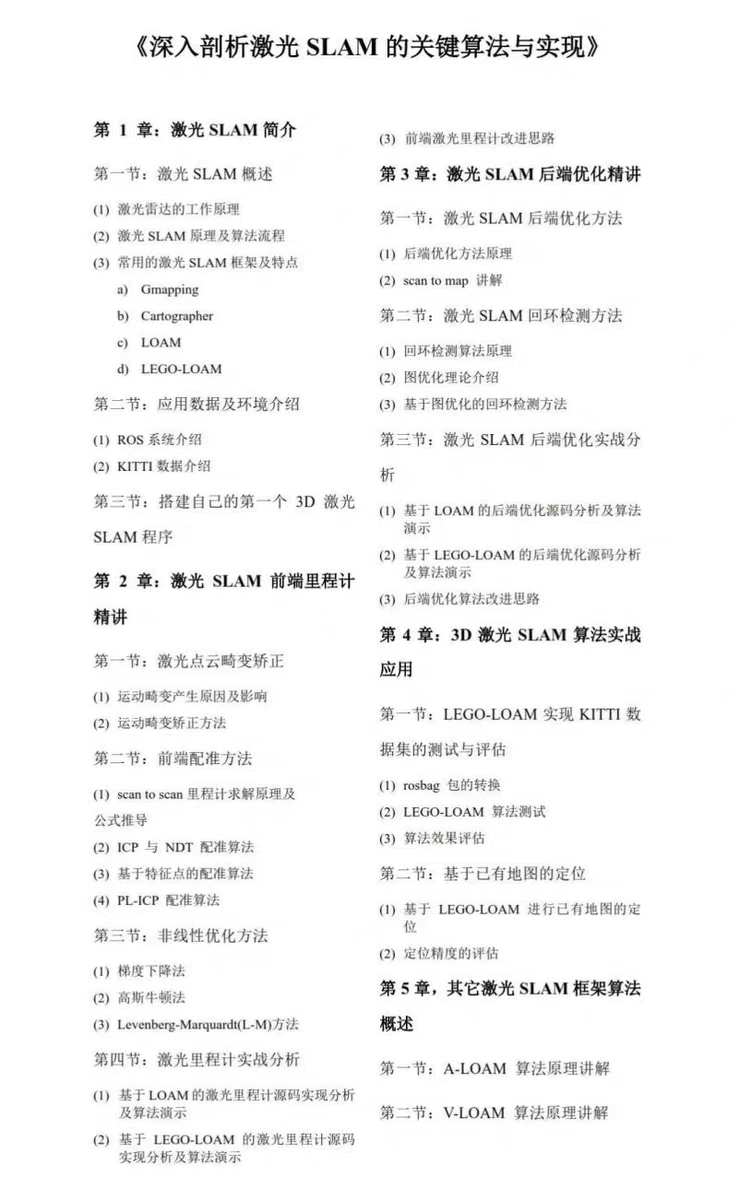
《深入剖析激光SLAM的关键算法与实现》
第1章:激光SLAM简介
第一节:激光SLAM概述
(1)激光雷达的工作原理
(2)激光SLAM原理及算法流程
(3)常用的激光SLAM框架及特点
a) Gmapping
b) Cartographer
c) LOAM
d) LEGO-LOAM
第二节:应用数据及环境介绍
(1) ROS系统介绍
(2) KITTI数据介绍
第三节:搭建自己的第一个3D激光
SLAM程序
第2章:激光SLAM前端里程计
精讲
第一节:激光点云畸变矫正
(1)运动畸变产生原因及影响
(2)运动畸变矫正方法
第二节:前端配准方法
(1) scan to scan里程计讲解及
公式推导
(2) ICP与NDT配准算法
(3)基于特征点的配准算法
(4) PL-ICP配准算法
第三节:非线性优化方法
(1)梯度下降法
(2)高斯牛顿法
(3) Levenberg-Marquartd(L-M)方法
第四节:激光里程计实战分析
(1)基于LOAM的激光里程计算法实现
及算法演示
(2)基于LEGO-LOAM的激光里程计算法
实现分析及算法演示
第3章:激光SLAM后端优化精讲
第一节:激光SLAM后端优化方法
(1)后端优化方法原理
(2) scan to map讲解
第二节:激光SLAM回环检测方法
(1)回环检测算法原理
(2)图优化理论介绍
(3)基于图优化的回环检测方法
第三节:激光SLAM后端优化实战分
析
(1)基于LOAM的后端优化算法解析及算法
演示
(2)基于LEGO-LOAM的后端优化源码分
析及算法演示
(3)后端优化算法改进思路
第4章:3D激光SLAM算法实现
应用
第一节:LEGO-LOAM实现KITTI数
据集的测试与评估
(1) rosbag 播放的校验
(2) LEGO-LOAM算法测试
(3)算法效果评估
第二节:基于已有地图的定位
(1)基于LEGO-LOAM进行已有地图的定
位
(2)定位精度的评估
第5章:其它激光SLAM框架算法
概述
第一节:A-LOAM算法原理讲解
第二节:V-LOAM算法原理讲解

© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...






![RuoYi若依框架 前端 部署[具体步骤]](https://img.dunling.com/blogimg/20251102/29f58bcc65ac4cbf907a15faec190a1c.jpg)