
基于STM32F1的扫地机器人,支持BootLoader支持PC通讯。基于Keil。
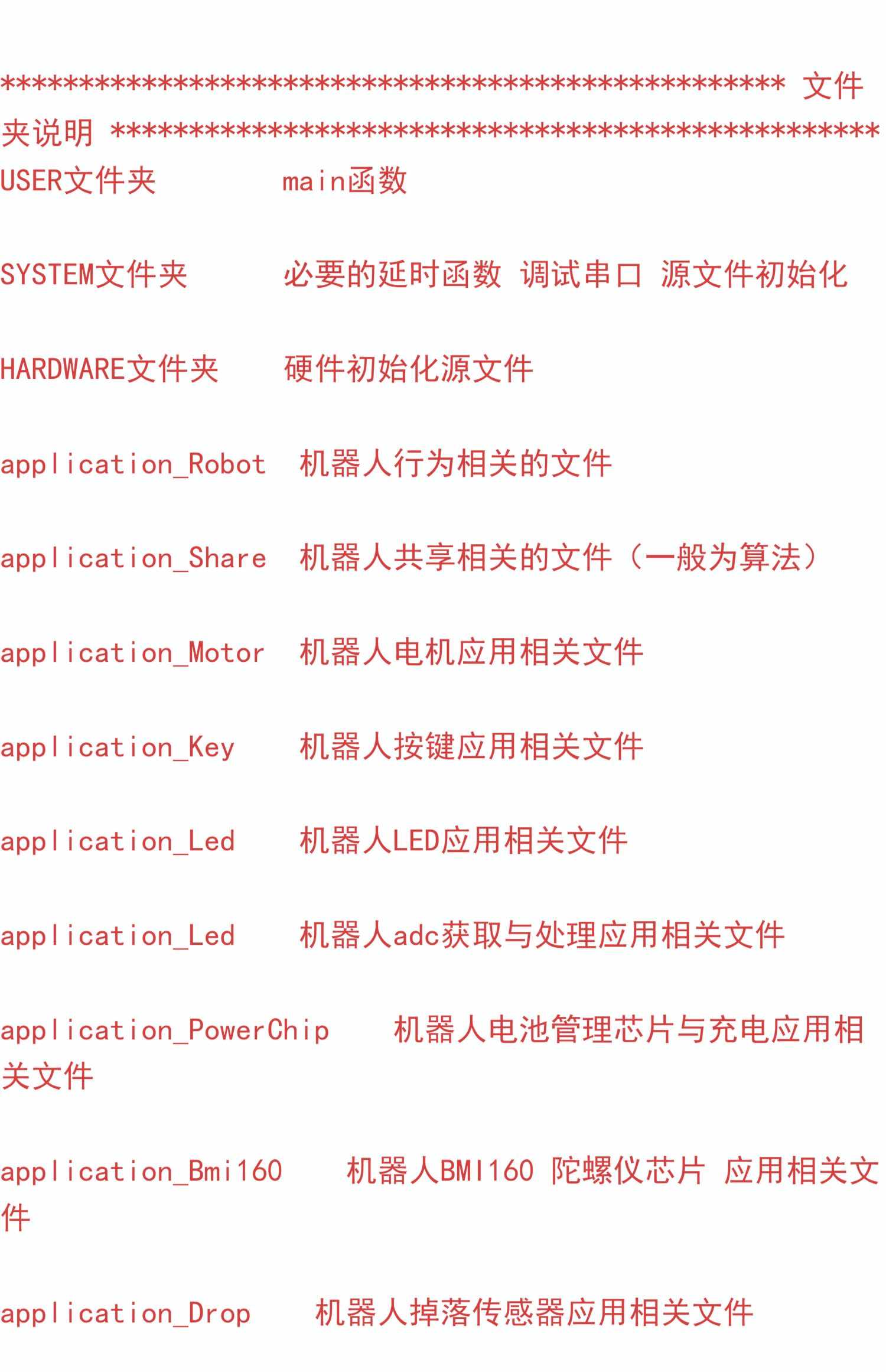
USER文件夹 main函数
SYSTEM文件夹 必要的延时函数 调试串口 源文件初始化
HARDWARE文件夹 硬件初始化源文件
application_Robot 机器人行为相关的文件
application_Share 机器人共享相关的文件(一般为算法)
application_Motor 机器人电机应用相关文件
application_Key 机器人按键应用相关文件
application_Led 机器人LED应用相关文件
application_Led 机器人adc获取与处理应用相关文件
application_PowerChip 机器人电池管理芯片与充电应用相关文件
application_Bmi160 机器人BMI160 陀螺仪芯片 应用相关文件
application_Drop 机器人掉落传感器应用相关文件
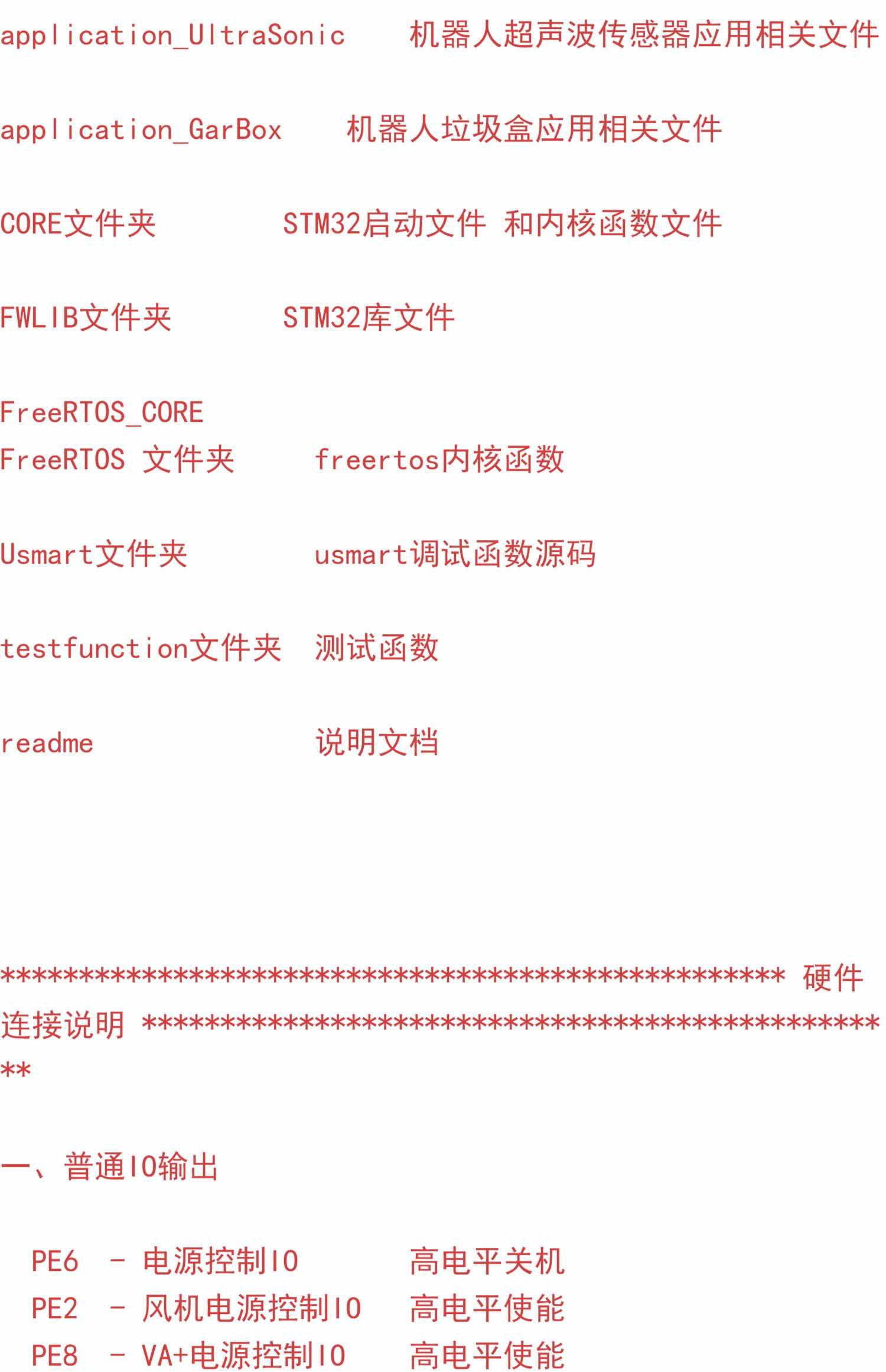
application_UltraSonic 机器人超声波传感器应用相关文件
application_GarBox 机器人垃圾箱应用相关文件
CORE文件夹 STM32启动文件 和内核函数文件
FWLIB文件夹 STM32库文件
FreeRTOS_CORE
FreeRTOS 文件夹 freertos内核函数
Usmart文件夹 usmart调试函数源码
testfunction文件夹 测试函数
readme 说明文档
PE6 – 电源控制IO 高电平关机
PE2 – 风机电源控制IO 高电平使能
PE8 – VA+电源控制IO 高电平使能
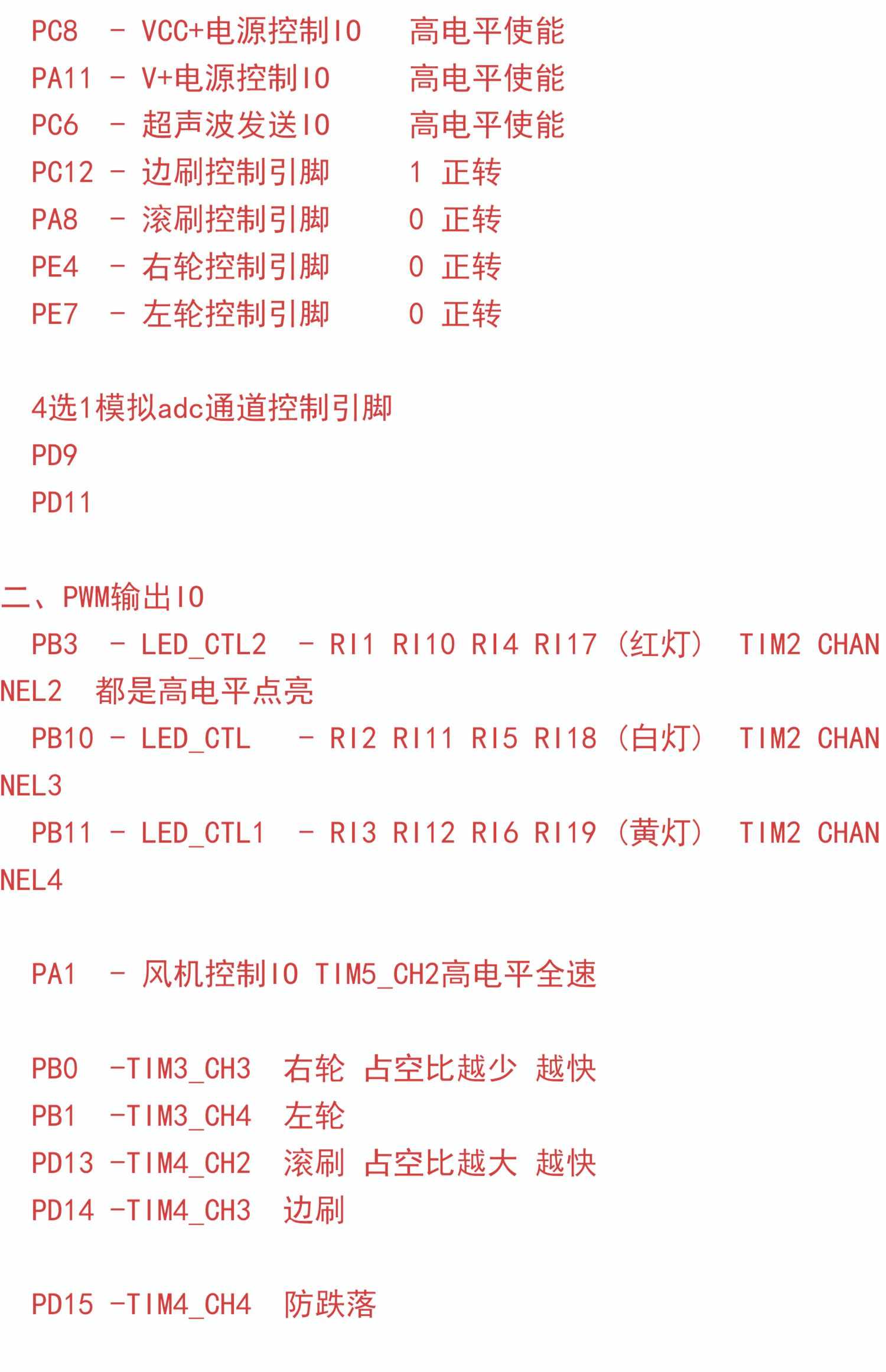
PC8 – VCC+电源控制IO 高电平使能
PA11 – V+电源控制IO 高电平使能
PC6 – 超声波发送IO 高电平使能
PC12 – 边刷控制引脚 1 正转
PA8 – 滚刷控制引脚 0 正转
PE4 – 右轮控制引脚 0 正转
PE7 – 左轮控制引脚 0 正转
4选1模拟adc通道控制引脚
PD9
PD11
PB3 – LED_CTL2 -R11 R10 R14 R17(红灯) TIM2 CHAN
NEL2 都是高电平点亮
PB10 – LED_CTL -R12 R11 R15 R18(白灯) TIM2 CHAN
NEL3
PB11 – LED_CTL1 -R13 R12 R16 R19(黄灯) TIM2 CHAN
NEL4
PA1 – 风机控制IO TIM5_CH2高电平全速
PB0 -TIM3_CH3 右轮 占空比越少 越快
PB1 -TIM3_CH4 左轮
PD13 -TIM4_CH2 滚刷 占空比越大 越快
PD14 -TIM4_CH3 边刷
PD15 -TIM4_CH4 防跌落
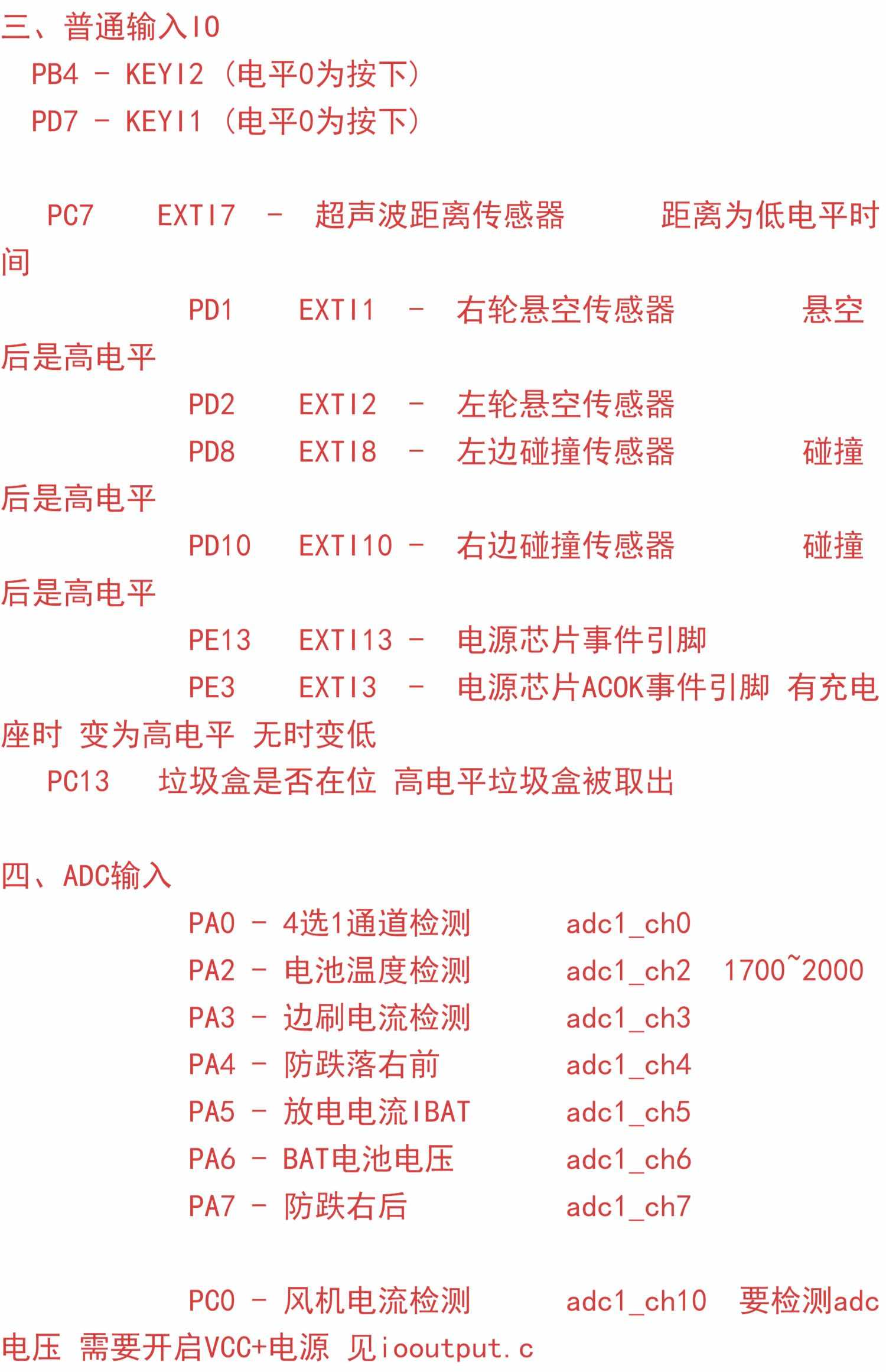
PB4 – KEYI2(电平0为按下)
PD7 – KEYI1(电平0为按下)
PC7 EXTI7 – 超声波距离传感器 距离为低电平时
PD1 EXTI11 – 右轮悬空传感器 悬空 后是高电平
PD2 EXTI12 – 左轮悬空传感器
PD8 EXTI18 – 左边碰撞传感器 碰撞 后是高电平
PD10 EXTI10 – 右边碰撞传感器 碰撞 后是高电平
PE13 EXTI13 – 电源芯片事件引脚
PE3 EXTI3 – 电源芯片ACOK事件引脚 有充电 座时 变为高电平 无时变低
PC13 垃圾箱是否在位 高电平垃圾箱被取出
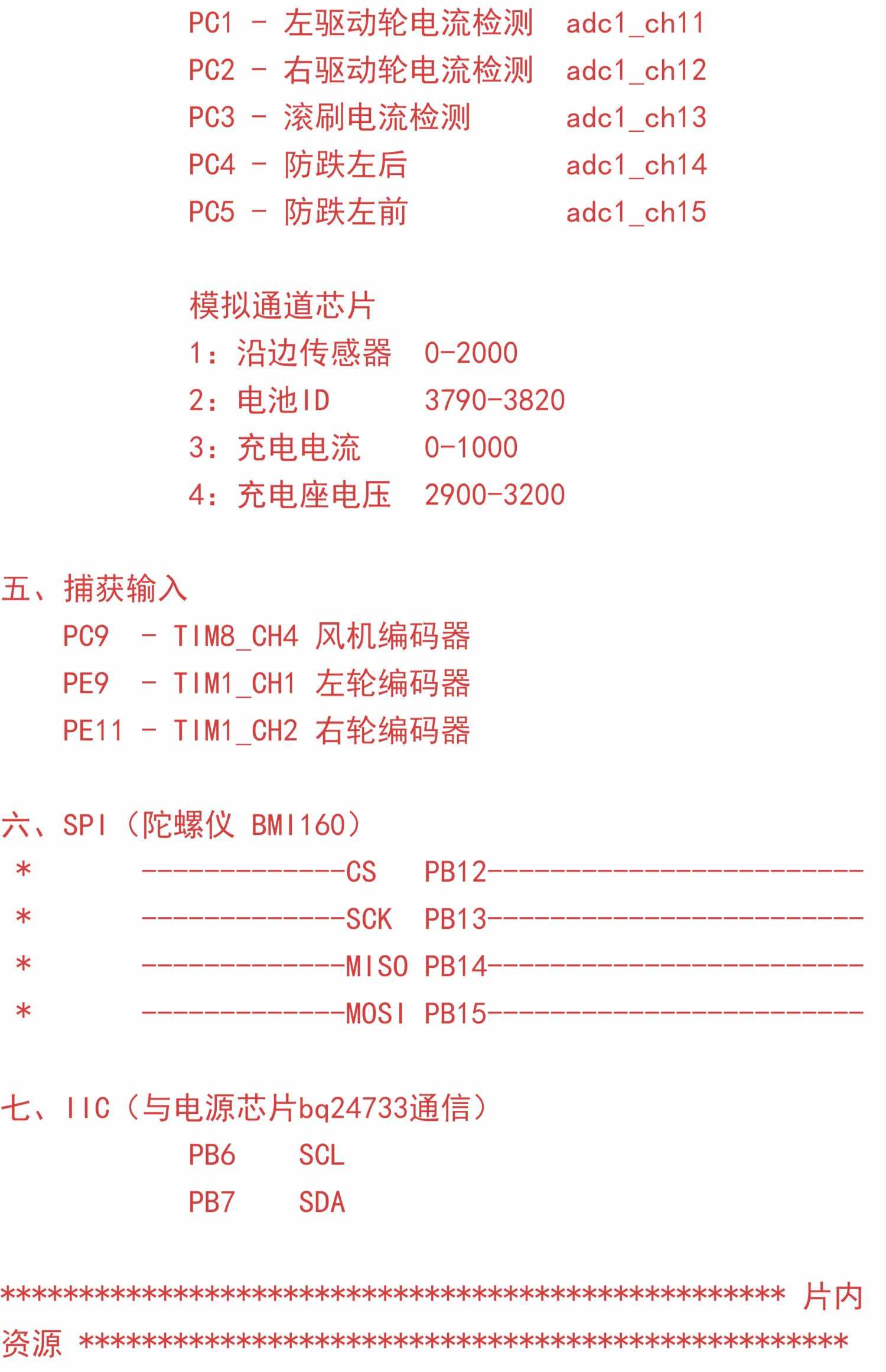
PA0 – 4选1通道检测 adc1_ch0
PA2 – 电池温度检测 adc1_ch2 1700~2000
PA3 – 边刷电流检测 adc1_ch3
PA4 – 防跌落右前 adc1_ch4
PA5 – 放电电流IBAT adc1_ch5
PA6 – BAT电池电压 adc1_ch6
PA7 – 防跌右后 adc1_ch7
PC0 – 风机电流检测 adc1_ch10 要检测adc 电压 需要开启VCC+电源 仿jeoutput.c

© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...










