产品简述
MS32006 是一款多通道电机驱动芯片,其中包含两路步进电机驱动,一路直流电机驱动;每个通道的电流最高电流1.0A;支持两相四线与四相五线步进电机。
芯片采用 I2C 的通信接口控制模式,兼容 3.3V/5V 的标准工业接口。
主要特点
双路步进电机驱动,整步进或 1/2 步进,最大工作电流 1A
I2C 串行总线通信控制电机
指令缓存功能,电机按照当前指令转动时预存下一条指令
集成一个直流电机驱动,最大驱动电流±1.1A
QFN24 封装(背部散热片)
应用
机器人,精密工业设备
摇头机
监控摄像机
云台
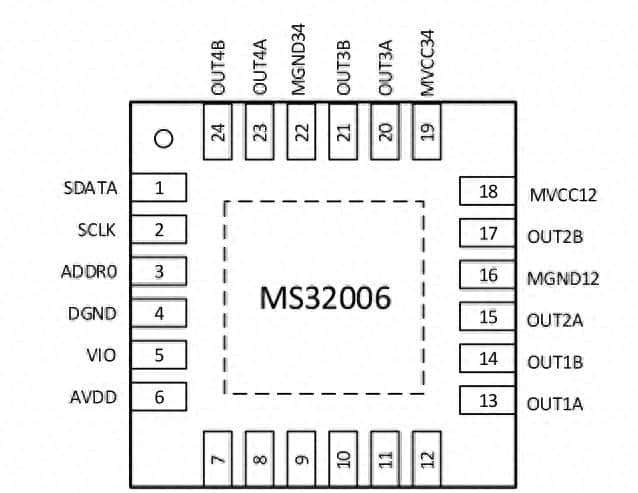
管脚定义
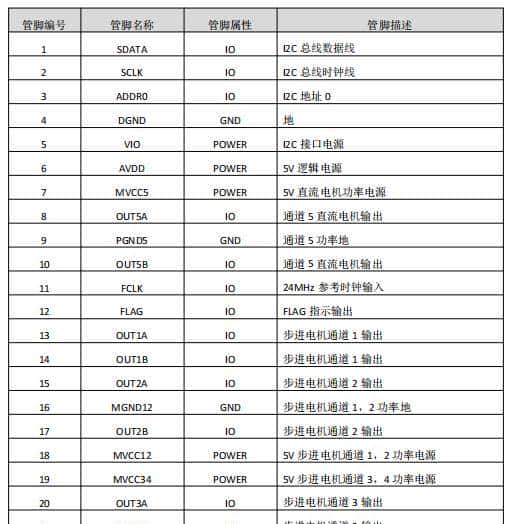
管脚说明
电气参数


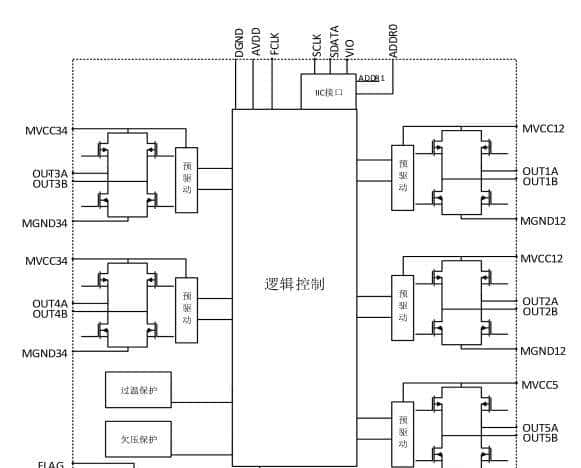
功能描述
MS32006 总共集成了两路步进电机驱动器与一路直流电机驱动器,通过 I2C 总线去控制电机的转动。步进电机控制器可以选择全步进或者 1/2 的步进模式,系统上一般用来做为小云台 X,Y 轴的运动控制。直流电机也是通过 I2C 设置内部的寄存器,来控制电机的正转,反转,刹车,自由旋转这四个状态,系统上可以用来做 IR-cut 的控制。
I2C 总线接口
芯片接口为 I2C,SDA 是一个双向数据线,SCL 是时钟输入。图 1 和 2 分别显示了一个写和一个读周期的信号时序。当时钟信号为高电平时,SDA 有一个下降沿作为起始条件;时钟信号为高电平时,SDA 的上升沿作为结束条件。SDA 的其它所有变化都发生在时钟信号为低电平时。
MS32006 的通信中,在起始条件后,由 7 位芯片地址和 1 位读/写位(高为读,低为写)组成的第一个字节(ADDR)被发送到 MS32006。7 位地址的前 3 位是固定的 001,末 3 位为固定的 000,第 4 位地址由 ADDR0 管脚控制。地址的第 8 位是读/写位。如果是一个【写】操作,接下来的一个字节包含寄存器地址指针(MAP),用来选择的所要读或写的寄存器。如果是个【读】操作,将输出 MAP 所指的寄存器的内容。MAP 自动递增,寄存器的数据将会依次出现。每一个字节由一个应答位(ACK)分隔开。在每次输入字节读取后 MS32006 输出应答位,每一个传输的字节后微控制器发送应答位给 MS32006。
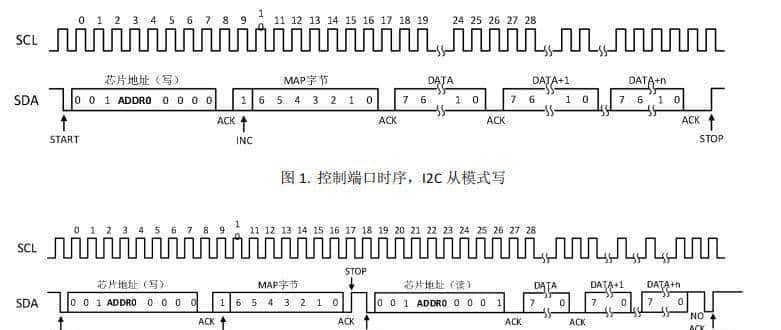
注意读操作时不能设置 MAP,因此需要一个终止的写操作作为一个头码。如图 2 所示,在作为MAP 的应答后发送一个停止条件,则写操作终止。
典型应用图
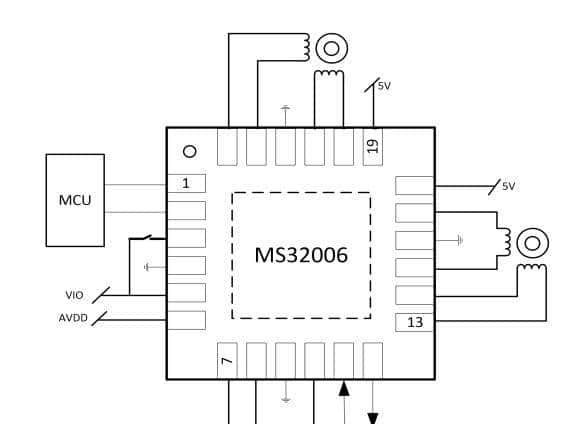
注:
1. MS32006 具有背部散热 pad,大功率应用时必须接地。
2. AVDD 5V 下,VIO 最低工作电压可以到 2.2V,AVDD 3.3V 下,VIO 最低工作电压可以到 1.8V
3. 所有的电压电路范围不要超过极限
综合热搜榜显示,上周ULN2803的搜索量明显增加,特在此分享MS23006给大家参考
热搜榜其一:ADS1248IPWR 亦有完全替代的型号推荐(软硬件无需更改),可参考我主页6月12发表的文章
以下是ULN2803和MS32006性能对比:

© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...