-
一、常见中间件模型介绍
- 1.1 (第一代)点对点CS(Client-Server)模型
- 1.2 (第二代)Broker(协商者)模型
- 1.3 (第三代)广播(Broadcast)模型
- 1.4 (第四代)以数据为中心的DDS(Data Distribution Service)模型
-
二、ROS2对中间件的需求
- 2.1 DDS是什么
- 2.2 DDS的应用场景
- 2.3 ROS2使用DDS的缘由
-
三、DDS初步介绍
- 3.1 DDS的核心标准
-
3.2 ROS2采用DDS的优点和缺点
- 3.2.1 优点
- 3.2.2 缺点
- 3.3 DDS的供应商
-
3.4 不同DDS性能对比
-
3.4.1 延迟
- 3.4.1.1 进程间
- 3.4.1.2 进程内
- 3.4.1.3 双主机
-
3.4.2 吞吐量
- 3.4.2.1 进程间
- 3.4.2.2 进程内
- 3.4.2.3 双主机
-
3.4.1 延迟
一、常见中间件模型介绍
中间件是一类提供系统软件和应用软件之间连接、便于软件各部件之间的沟通的软件,应用软件可以借助中间件在不同的技术架构之间共享信息与资源。中间件位于客户机服务器的操作系统之上,管理着计算资源和网络通信。
中间件根据拓扑结构可分为四种模型,分别是点对点CS(Client-Server)模型、Broker(协商者)模型、广播(Broadcast)模型、DDS(Data Distribution Service)模型,如下图所示。
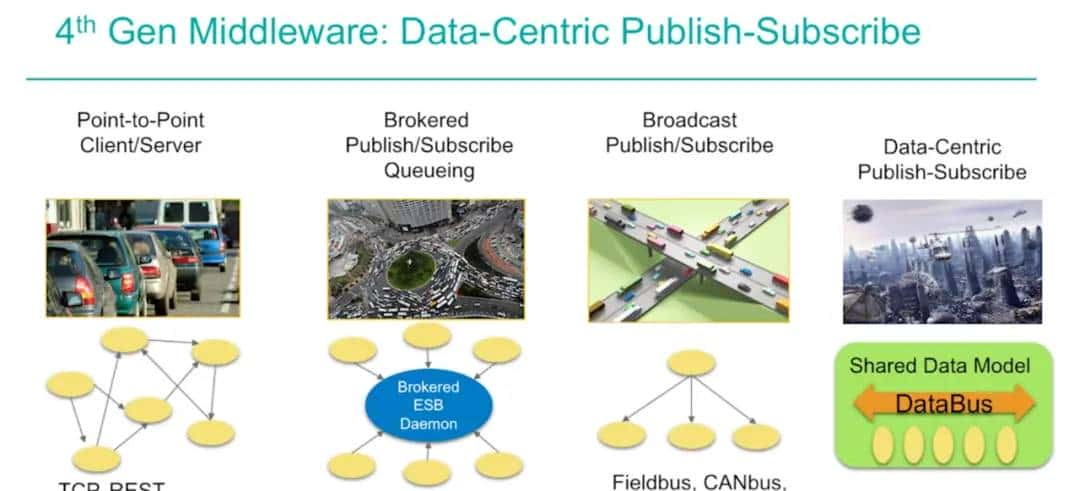
1.1 (第一代)点对点CS(Client-Server)模型
许多客户端连接到一个服务端,每次通信时,通信双方必须建立一条连接。当通信节点增多时,通信的连接数也会增多。每个客户端都需要知道服务器的具体地址和所提供的服务。一旦服务器地址发生变化,所有客户端都会受到影响。
最典型的就是TCP通信,当对方的IP地址和端口号发生改变,所有与该程序通信的节点都将受到影响。
1.2 (第二代)Broker(协商者)模型
这是一种消息中间件,特点是具有中心服务器。
面向消息的系统(消息中间件)是在分布式系统中完成消息的发送和接收的基础软件。消息中间件也可以称消息队列,是指用高效可靠的消息传递机制进行与平台无关的数据交流,并基于数据通信来进行分布式系统的集成。通过提供消息传递和消息队列模型,可以在分布式环境下扩展进程的通信。
当前业界比较流行的开源消息中间件包括:ActiveMQ、RabbitMQ、RocketMQ、Kafka、ZeroMQ等,其中应用最为广泛的要数RabbitMQ、RocketMQ、Kafka 这三款。
中心服务器Broker统一负责初步处理所有人的请求,并进一步找到真正能响应服务的角色。这使得客户端可以不用关心服务器的具体地址。服务端地址如果发生变化,只需要告知Broker就可以了。这个模型的特征也很明显,Broker作为核心,它的处理速度会影响所有节点的效率,当系统规模增长到必定程度,Broker将成为整个系统的性能瓶颈。对于资源相对吃紧的嵌入式系统,这个问题会更为突出。更糟糕的是,如果Broker发生异常,可能导致整个系统都无法正常运转。
最典型的就是ROS中存在的Master节点,如果该节点挂掉,所有ROS节点都将无法正常工作。
1.3 (第三代)广播(Broadcast)模型
所有人都可以在通道上广播消息,并且所有人都可以收到消息。这个模型解决了服务器地址的问题,且通信双方不用单独建立连接,但它存在的问题是:广播通道上的消息太多了,所有人都必须关心每条消息,无论是否与自己有关。
最典型的就是CANbus,CAN节点发送的消息帧会在CANbus上不停的广播,与其它CAN节点是否存在都没有关系,这样严重影响总线上的带宽。
1.4 (第四代)以数据为中心的DDS(Data Distribution Service)模型
这种模型与广播模型有些类似,所有人都可以在DataBus上发布和订阅消息。但它的先进之处在于,通信中包含了许多并行的通路,可以只关心自己感兴趣的消息,忽略不感兴趣的消息。
下图展示了DDS在网络栈中的位置,它位于传输层的上面,并且以TCP,UDP为基础。
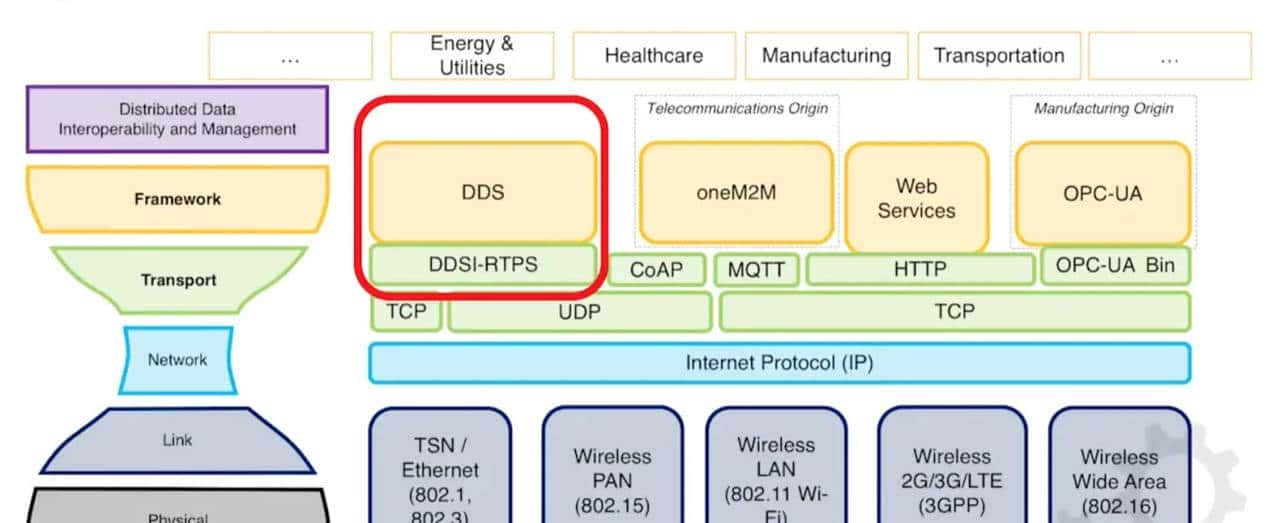
这个图之所以是沙漏形状是由于:两头的技术变化都发展很快,但是中间的却鲜有变化。
二、ROS2对中间件的需求
在探索下一代ROS通信系统的选项时,最初的选项是改善ROS 1的传输系统或者使用诸如ZeroMQ、谷歌的Protocol Buffers和zeroconf(Bonjour/Avahi)等组件库来构建新的中间件。但是,除了那些需要从头开始或部分从头开始构建中间件的选项之外,还思考了其他已有的端到端中间件。在研究过程中,一个脱颖而出的中间件就是DDS。
2.1 DDS是什么
DDS是OMG组织在2004年发布的中间件协议和应用程序接口(API)标准,它为分布式系统提供了低延迟、高可靠性、可扩展的通信架构标准。它将系统的组件集成在一起,提供业务和任务关键型物联网 (IoT) 应用程序所需的低延迟数据连接,具有极高的可靠性和可扩展架构。
OMG(Object Management Group)成立于1989年,是一个开放性的非营利性的计算机行业标准联盟。OMG多年来致力于为工业分布式系统提供可互操作的,可移植的,可复用的软件标准。许多我们熟知的标准都来自OMG,列如UML(Unified Modeling Language),CORBA(Common Object Request Broker Architecture)等。
OMG组织发布的只是DDS标准,而标准的实现是由各个DDS提供商完成,其中有商用的如RTI,也有开源的如Object Computing的OpenDDS、eProsima的FastDDS。
2.2 DDS的应用场景
DDS最早应用于美国海军,用于解决舰船复杂网络环境中大量软件升级的兼容性问题,后来扩展至航空、航天、船舶、国防、金融、通信、汽车等领域,包括作战系统、船舶导航和控制系统、船舶防御系统、无人机驾驶系统和地面控制系统、装甲车辆控制系统、仿真和培训系统、雷达处理和空中交通管理系统、金融系统等。

2018年,DDS首次被引进AUTOSAR AP,作为可选择的通信方式之一。2018年3月,DDS的主要提供者RTI公司宣布,AUTOSAR AP的最新版本(版本18-03)已经具有DDS标准的完整网络绑定。
百度Apollo的自动驾驶框架Cyber RT的底层使用了开源的DDS,将DDS作为最重大的通信机制。与此相对应的是,Xaver、Orin等面向自动驾驶的SOC芯片上也都预留了DDS接口,英伟达的Xavier自带的Driver.OS中便采用了FastDDS或OpenDDS这样的开源DDS。
2.3 ROS2使用DDS的缘由
使用像DDS这样的端到端中间件的好处是,需要维护的代码要少得多,可以让ROS2开发人员腾出手专注机器人开发。
DDS中间件的行为和确切规范已经提炼到文档中。除了系统级文档,DDS还具有推荐用例和软件API。有了这个具体的规范,第三方可以审查、审计和实施具有不同程度互操作性的中间件。这是ROS从未有过的特性,除了wiki中的一些基本描述和参考实现外。此外,如果要从现有软件库构建新的中间件,则无论如何都需要创建这种类型的规范。
三、DDS初步介绍
3.1 DDS的核心标准
DDS的核心标准分为两种,分别是API标准和协议(Protocol)标准,即DCPS规范和DDSI-RTPS规范。
-
DCPS规范:API标准保证了不同DDS实现的应用程序的可移植性。
-
DDSI-RTPS规范:协议标准保证了不同厂家的DDS可实现互操作性。
DDS 规范的开发始于 2001 年。它由软件框架公司 Real-Time Innovations (RTI) 和法国国防公司Thales Group开发。2004 年,对象管理组(OMG) 发布了 DDS 1.0 版。1.1 版于 2005 年 12 月发布,1.2 版于 2007 年 1 月发布,1.4 版于 2015 年 4 月发布。
RTPS协议 2.0 版于 2008 年 4 月发布,2.1 版于 2010 年 11 月发布,2.2 版于 2014 年 9 月发布,2.3 版于 2019 年 5 月发布。

下图从下往上可分为三层,分别是网络通信协议层、DDS层、应用程序层,其中红白线框内是DDS的核心标准.
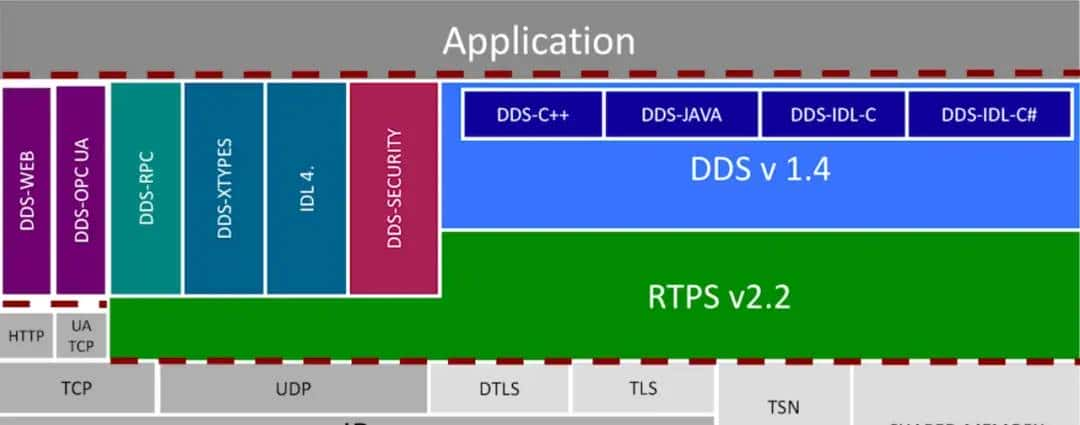
DDS的核心标准包括:
-
DDS v1.4 – 描述了用于分布式应用程序通信和集成的以数据为中心的发布-订阅(DCPS)模型;
-
DDSI-RTPS v2.3 – 定义了实时发布-订阅交互通信协议(RTPS);(v2.3是2019年发布,Fast-DDS目前2022.11采用的依旧是v2.2)
-
IDL v4.2 – 定义了IDL,一种用于以独立于编程语言的方式定义数据类型和接口的语言。这不属于DDS标准,但DDS依赖于它。
DDS规范总共有四个正式版本,如下表所示:
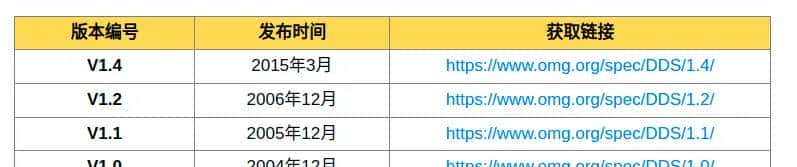
其中1.4版本相较于1.2版本最大的变化是将1.2版本中的可选部分(第八章 数据本地重建层)去除。
RTPS规范总共有四个正式版本,如下表所示:

其中2.3版本相较于2.2版本主要修改了以下部分:
8.2.1中Participant类与Endpoint类关系由2.2版本中的无关系变为组合关系;Participant类增加guidPrefix成员变量,Endpoint类增加endpoint成员变量;
8.2.3 RTPS CacheChange类增加inlineQoS成员变量;
8.2.4 RTPS Entity类增加了同一参与者内部端点组的GUID信息,主要是指Publisher和Subscriber的GUID;同时Endpoint类也继承Entity类;
8.2.5 RTPS Participant类与Endpoint类之间增加了一个Group类;
8.3.2关于数据类型定义添加了GroupDigest_t类型;
8.3.3 RTPS消息组成结构部分去除NoKeyData以及NoKeyDataFrag类型;
8.3.4 RTPS消息接收器(RTPS Message Receiver)增加对HeaderExtension的依赖;
8.3.5 RTPS子消息元素(RTPS SubmessageElements)增加了KeyHashPrefix、KeyHashSuffix以及GroupDigest数据类型的支持;将2.2版本的Flags数据类型改为StatusInfo类型;将SerializedPayload以及SerializedPayloadFragment类型合并为SerializedData类型;
8.3.7.2 Data报文类型添加NonStandardPayloadFlag字段;
8.3.7.3 DataFrag报文类型添加NonStandardPayloadFlag及KeyFlag字段;
8.3.7.4 Gap报文类型添加GroupInfoFlag、gapStartGSN以及gapEndGSN字段;
8.3.7.5 Heartbeat报文类型添加GroupInfoFlag、currentGSN、firstGSN、lastGSN、writerSet以及secureWriterSet字段;
8.4.7.1 RTPS Writer类增加dataMaxSizeSerialized成员变量;RTPS Writer类的new_change方法增加inlineQos参数。
8.4.7.2 RTPS StatelessWriter类去除resendDataPeriod数据成员;
8.4.7.5 RTPS ReaderProxy类增加remoteGroupEntityId成员;
8.4.10.4 RTPS WriterProxy类增加dataMaxSizeSerialized和remoteGroupEntityId成员;
8.4.12.1 Best-Effort StatefulReader 行为变换图改变;
8.4.13.4 Participant Message Data数据组成添加kind字段;
8.4.15.7 在HeartbeatFrag和NackFrag报文中增加count;
8.5.3.2 SPDPdiscoveredParticipantData数据类型增加domainId、domainTag 和builtinEndpointQos字段;
8.7.5 添加Group Ordered Access实现;
9.3.1.2 EntityId_t添加Writer Group和Reader Group实体ID类型;
9.6.3 In-line QoS增加PID_GROUP_COHERENT_SET、PID_GROUP_SEQ_NUM、PID_WRITER_GROUP_INFO以及PID_SECURE_WRITER_GROUP_INFO等字段支持;
10 数据串化封装增加CDR2_BE、CDR2_LE、PL_CDR2_BE、PL_CDR2_LE、D_CDR_BE、D_CDR_LE和XML 等版本字段。
图片参考:https://www.bilibili.com/video/BV12z4y167w2
核心规范参考:https://www.platforu.com/DetailsPage?id=17
fast-dds的RTSP规范:https://www.eprosima.com/index.php/products-all/eprosima-fast-dds
3.2 ROS2采用DDS的优点和缺点
3.2.1 优点
发布/订阅模型:简单解耦,可以轻松实现系统解耦
性能:在发布/订阅模式中,与请求/回复模式相比,延迟更低,吞吐量更高。
远程参与者的自动发现:此机制是 DDS 的主要功能之一。通信是匿名的、解耦的,开发者不必担心远程参与者的本地化。
丰富的 Qos 参数集,允许调整通信的各个方面:可靠性、持久性、冗余、寿命、传输设置、资源……
实时发布订阅协议 ( RTPS ):该协议几乎可以通过任何传输实现,允许在 UDP、TCP、共享内存和用户传输中使用 DDS,并实现不同 DDS 实现之间的真正互操作性。
实时性:DDS通过优化的内核机制,实现微秒级的数据传输;纯分布式的系统结构,保证系统内不存在影响实时性的瓶颈节点。DDS 实体被建模为类或类型化接口,允许提前分配内存而不是动态分配内存,可以更有效的对资源处理。
可靠性:DDS提供点到点的信息交互服务,从而保证整个系统服务不存在单点故障的风险;同时提供可靠传输策略,通过重发机制确保数据可靠地传输。
持续性:DDS可以通过相应的QoS为ROS提供数据历史的服务,新加入的节点也可以获取发布的所有历史数据。
灵活性:应用系统可以根据应用场景需求,灵活选择多种DDS提供的应用级QoS策略(例如可靠性传输、数据过滤、优先级排序等等),以满足系统的灵活性需求。
扩展性:DDS使用“订阅/发布”机制进行数据交互,建立全局的虚拟数据空间,在通信层面将应用逻辑与节点的物理信息解耦合,使系统能够方便的实现节点增减或系统本身的分割/合并,满足系统的扩展性需求;运行时由DDS自动发现并连接设备和应用程序,即插即用,无需系统管理或目录服务。
异构网络支持:DDS通过适配底层多种异构架构网络,对上层提供无差别的通信服务,使通信软硬件层对应用层完全透明。
3.2.2 缺点
使用端到端中间件的缺点是 ROS 必须在已有的设计中工作。如果设计没有针对相关用例或不灵活,则可能需要围绕设计工作。在某种程度上,采用端到端中间件包括采用该中间件的理念和文化,没那么简单。
API复杂,DDS 的灵活性是以复杂性为代价的。
系统开销相对较大
社区支持问题,但ROS2近两年来使用DDS后社区表现还是不错的。
3.3 DDS的供应商
OMG发布的只是DDS标准,而标准的实现是由各个DDS提供商完成,其中有商用的如RTI,也有开源的如Object Computing的OpenDDS、eProsima的FastDDS。
目前(2022.10)OMG 维护 DDS 供应商的活动 列表见下图。

全球范围内,DDS市场份额最大的供应商(80%左右)的是成立于1991年的美国RTI公司(全称为Real-Time Innovations)。RTI作为OMG组织董事会的成员,主导了DDS标准的制定,从2004年开始负责主持DDS工作组的工作,目前已经成为这个行业的领导者,对DDS标准有足够的权威。
RTI开发的DDS品牌名为Connext,,因此又被称为Connext DDS。
FastDDS是由eProsima公司推出,由RTI原核心团队成员在欧洲创办,是在自动驾驶领域比较有影响力的开源DDS。eProsima供应商提供也直接访问 DDS 有线协议 RTPS 的实现。
OpenDDS 由Object Computing开发,它和FastDDS具有必定的类似性——两者都是基于RTPS实现的,面向数据的通信框架,遵循的是同一标准。这类框架的典型特征是去中心化,支持QoS机制,支持实时通信。但一般会绑定如protobuf等序列化工具。
CycloneDDS是由Eclipse基金会开发的。
3.4 不同DDS性能对比
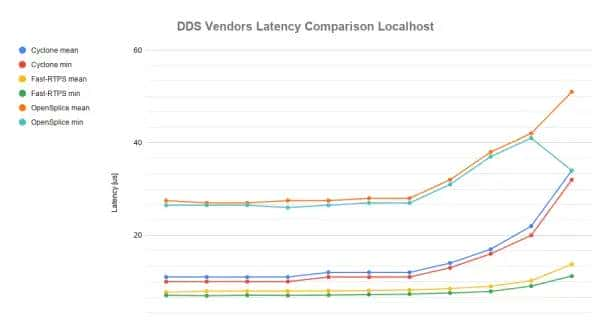
这里对Fast RTPS、Cyclone DDS、OpenSplice DDS从进程间、进程内、双主机三种场景下的延迟和吞吐量对比测试
3.4.1 延迟
3.4.1.1 进程间
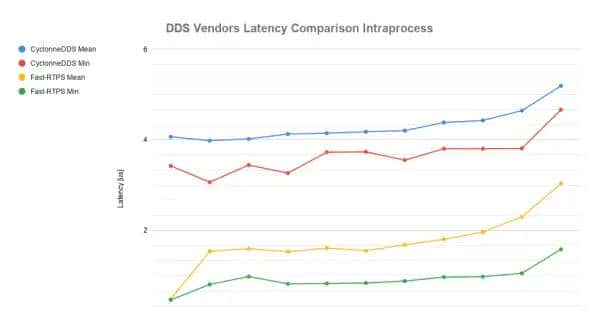
3.4.1.2 进程内
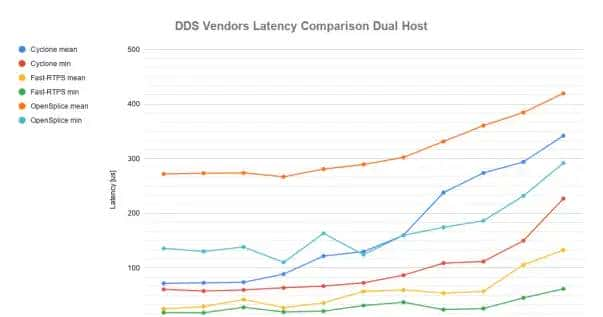
3.4.1.3 双主机
3.4.2 吞吐量
3.4.2.1 进程间
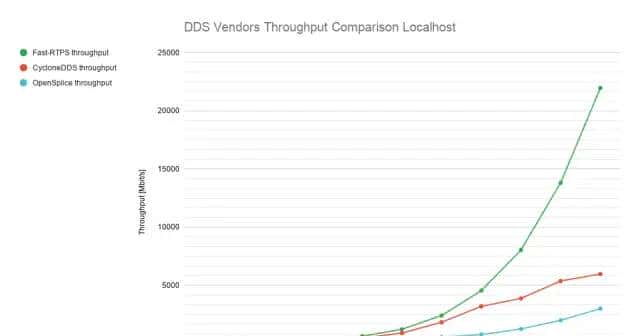
3.4.2.2 进程内
由于 Cyclone DDS 不提供进程内测试,eProsima 无法将第二种方案包括在吞吐量性能基准测试中。
3.4.2.3 双主机
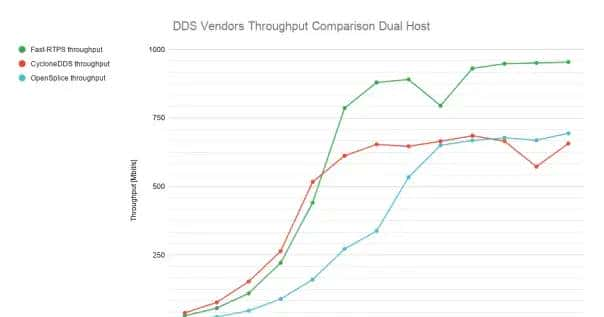
结论:在所有测试的情况下,Fast RTPS所提供的延迟更短,吞吐量更高。
参考:
[译] Fast RTPS与Cyclone DDS与OpenSplice DDS对比测试:
https://www.jianshu.com/p/0e0f5ce6b4ce
DDS在自动驾驶中的地位,强烈推荐:
https://blog.csdn.net/usstmiracle/article/details/125498440
https://m.eefocus.com/automobile-electronics/515201
https://codeantenna.com/a/ofZLhMddDa
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...