ROS2-RViz-MoveIt-Gazebo-URDF学习笔记(二)
创建工作空间创建机器人描述文件夹配置MoveIt
创建工作空间
# 1. 新建空间
mkdir -p ~/aubois35_ws/src
cd ~/aubois35_ws
# 2. 编译(第一次 src 可以是空的,没关系),要在工作空间的根目录aubois35_ws
colcon build # 生成 install/setup.bash 等
# 3. 把环境加载到当前终端
source install/setup.bash
# source install/local_setup.bash
创建机器人描述文件夹
将SolidWorks导出的URDF文件复制到aubois35_ws/src路径下
如果需要更改导出文件夹的名称,则需要把文件夹内部所有文件与旧名称相关的部分都修改为新名称。
由于SolidWorks导出的URDF文件适配于ROS1,不适用ROS2,因此需要更改该文件夹。
将上述3个文件复制到当前路径下,并将is35_description压缩一份,以免转换过程出错。
然后在当前路径打开终端,运行
python dir_ros2.py
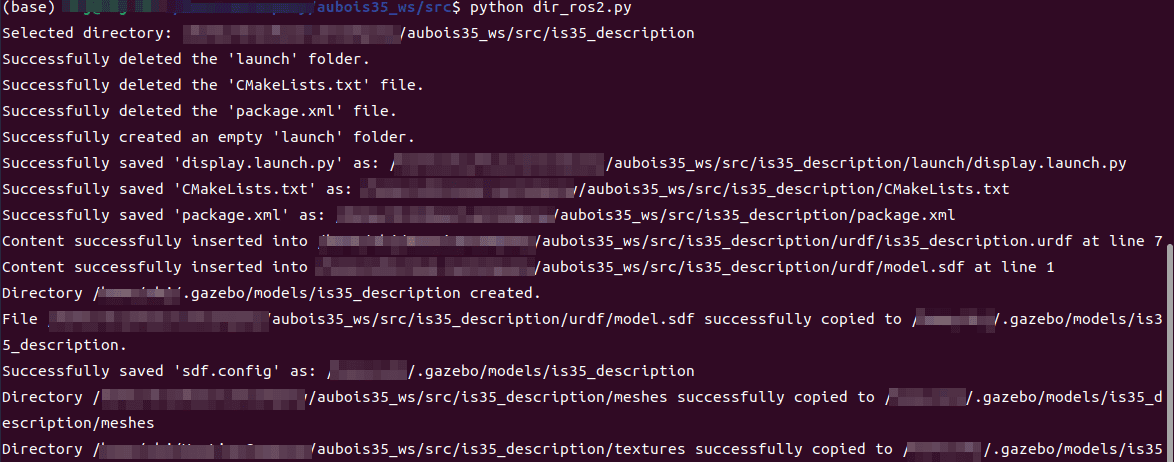
转换完成后,编译一下工作空间
运行测试
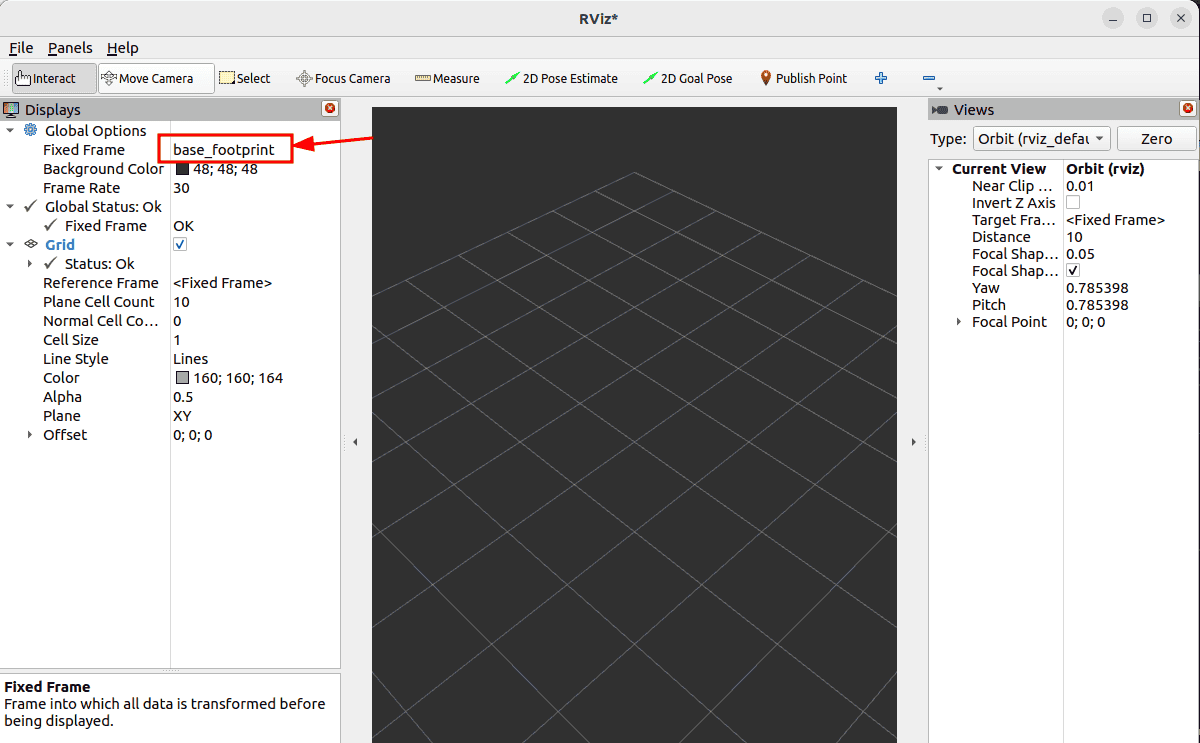
开启RViz
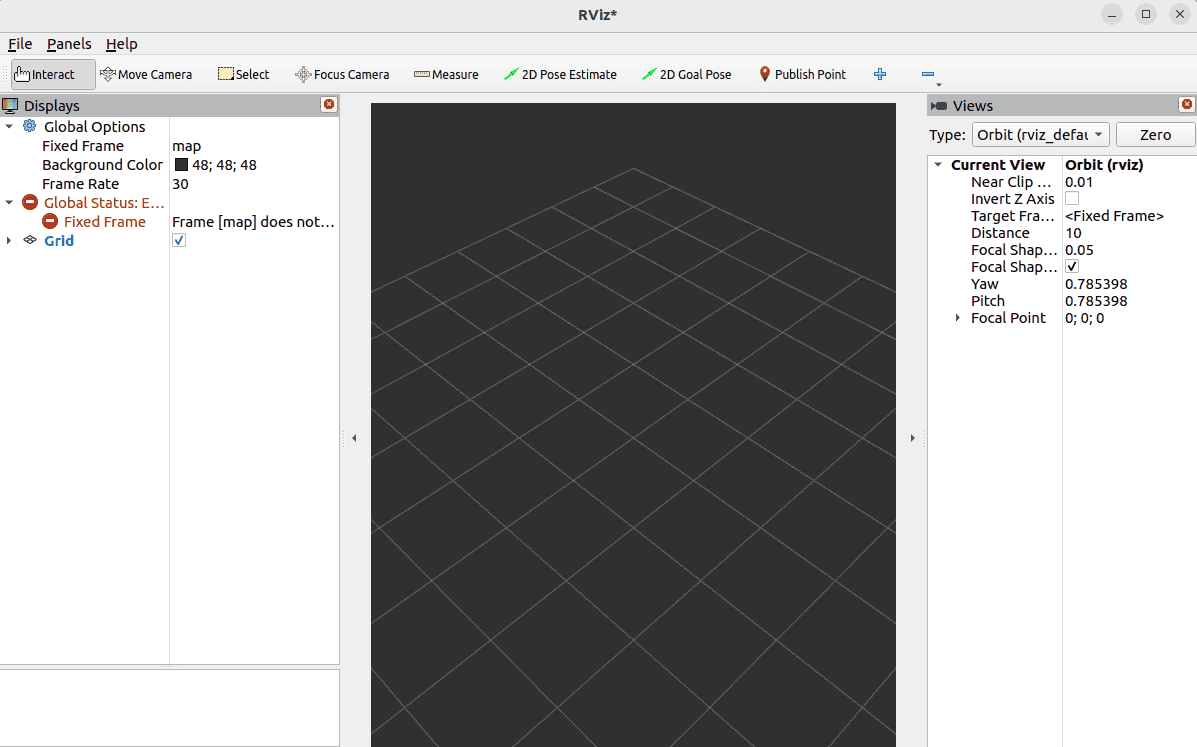
首先选择“Fixed Frame”
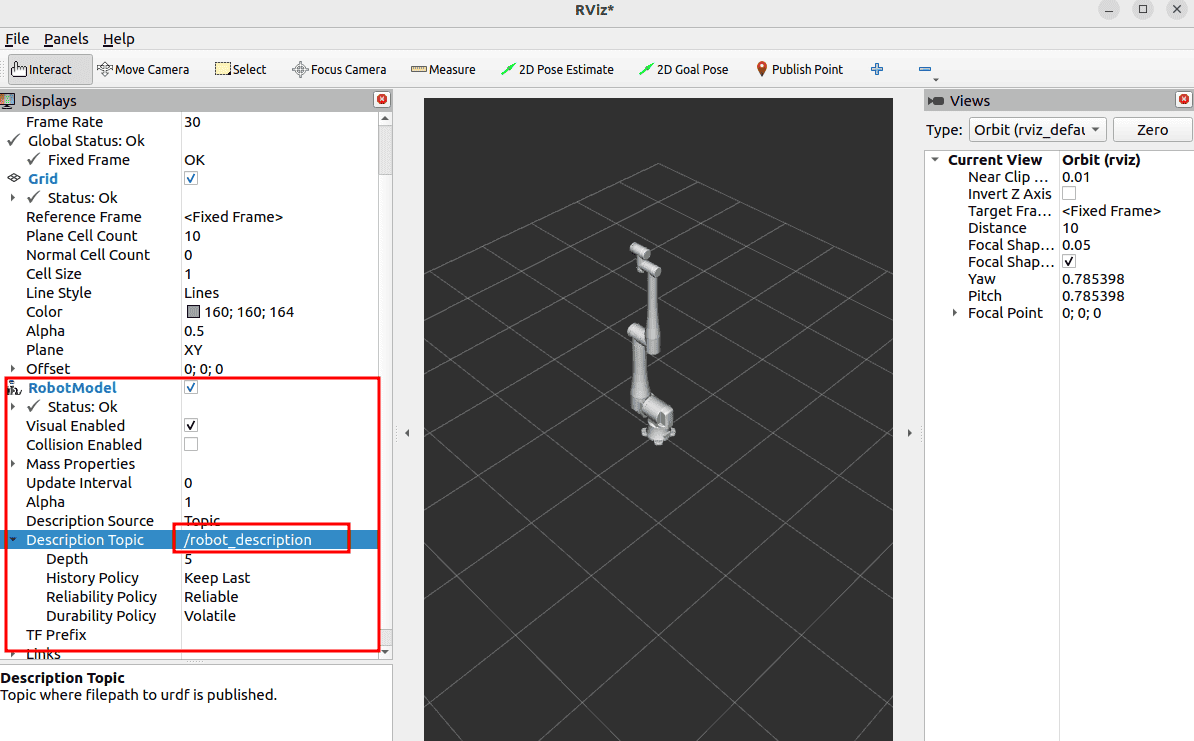
然后添加”RobotModel”

在”RobotModel”中选择Topic为“/robot_description”,回车即可看到机械臂模型。
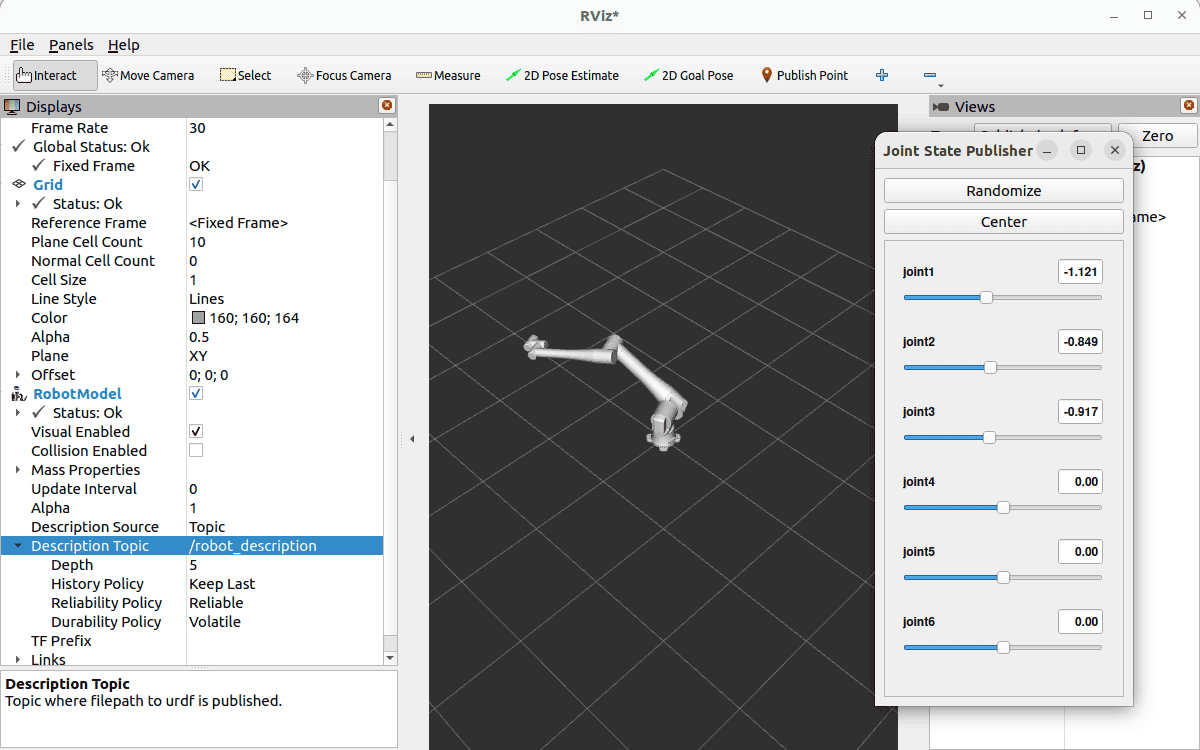
通过Joint State Publisher控制机械臂运动。
至此已完成URDF文件的配置。
配置MoveIt
source install/local_setup.bash
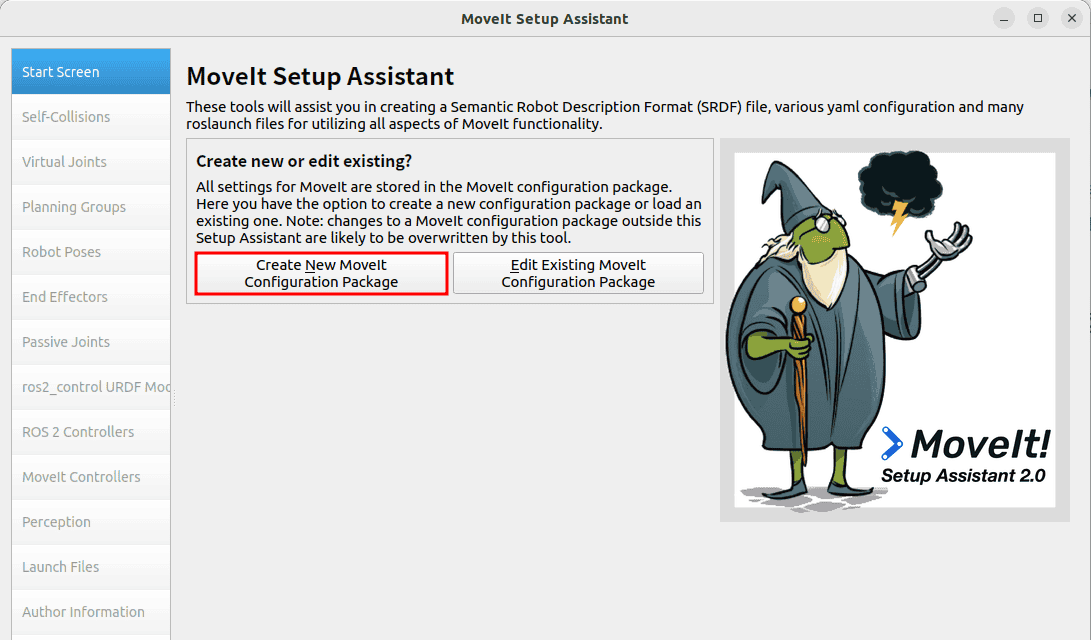
ros2 run moveit_setup_assistant moveit_setup_assistant

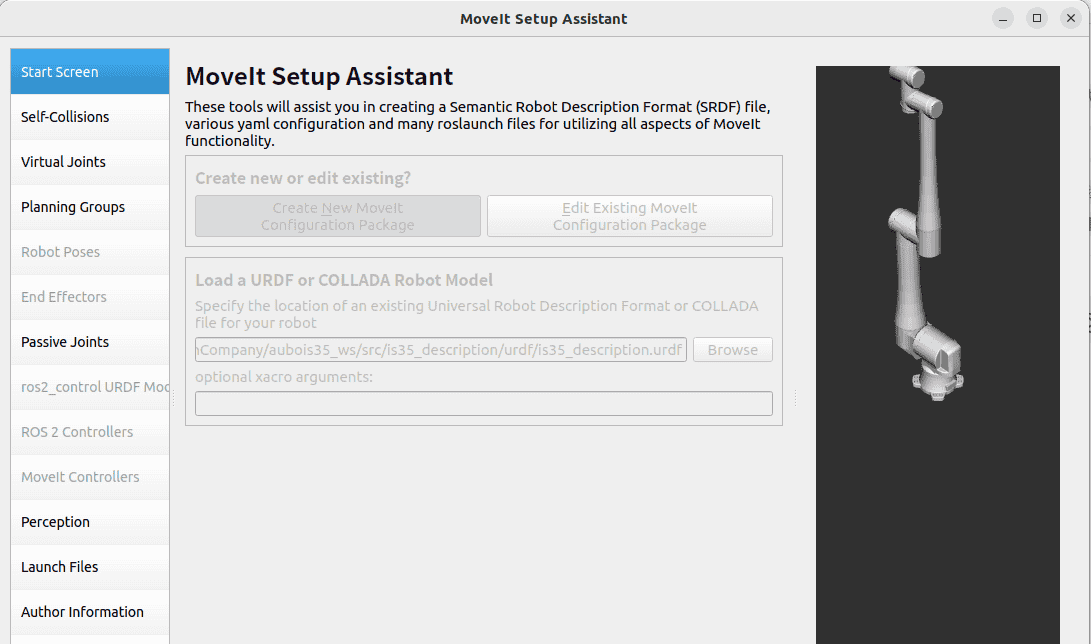
打开Moveit Setup Assistant页面
选择URDF文件路径
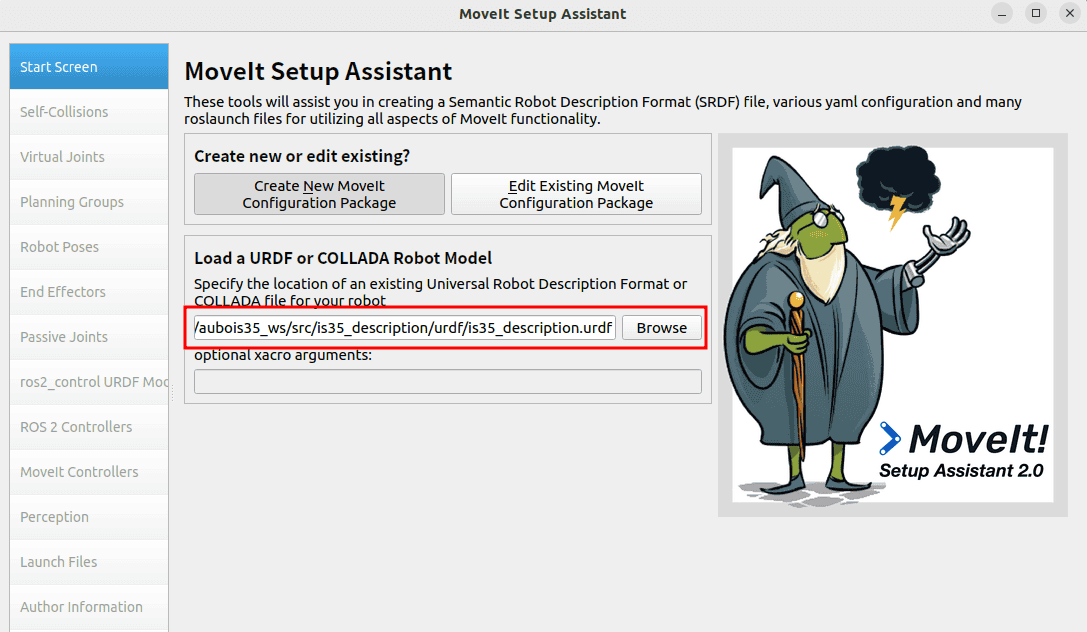
加载完成。
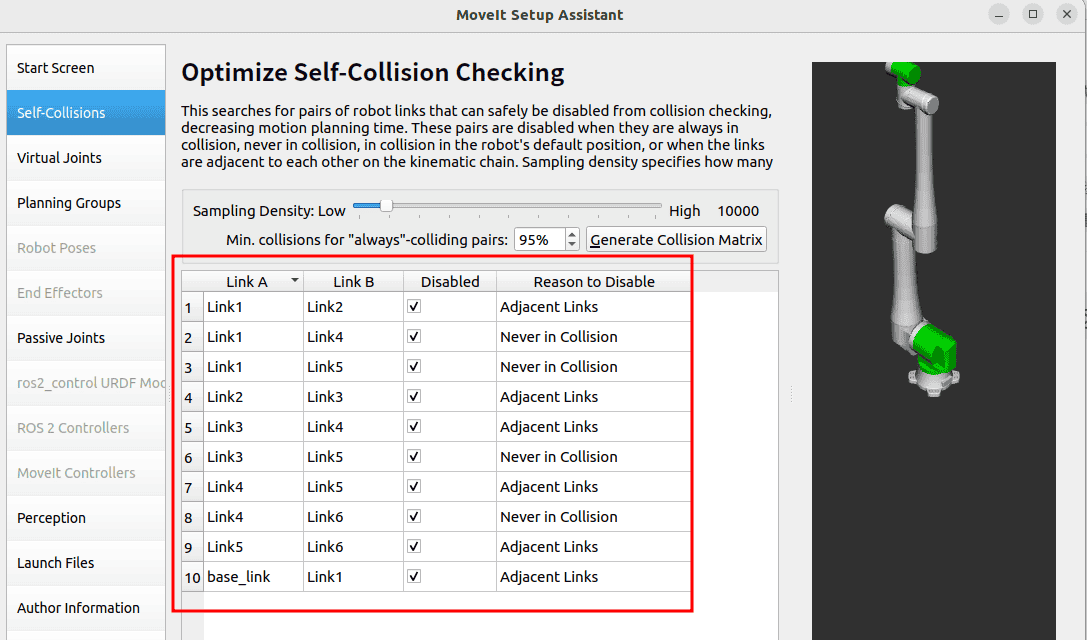
配置机械臂自碰撞矩阵
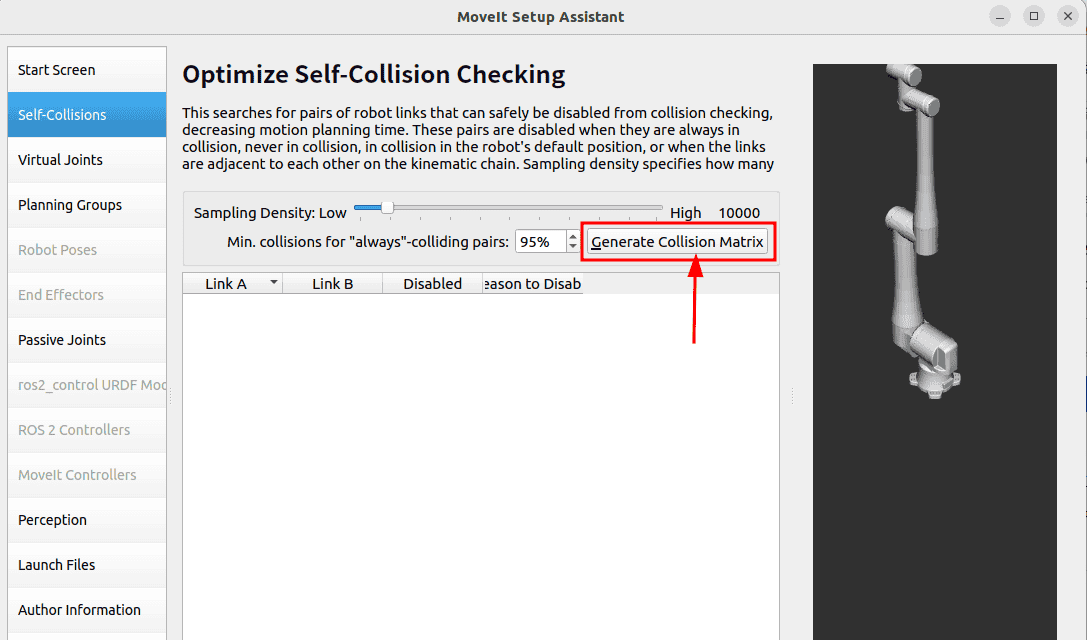
点击”Generate Collision Matrix”,自动生成,检查一下是否满足需求
添加虚拟关节,针对固定基座机械臂,添加一个固定的虚拟关节。

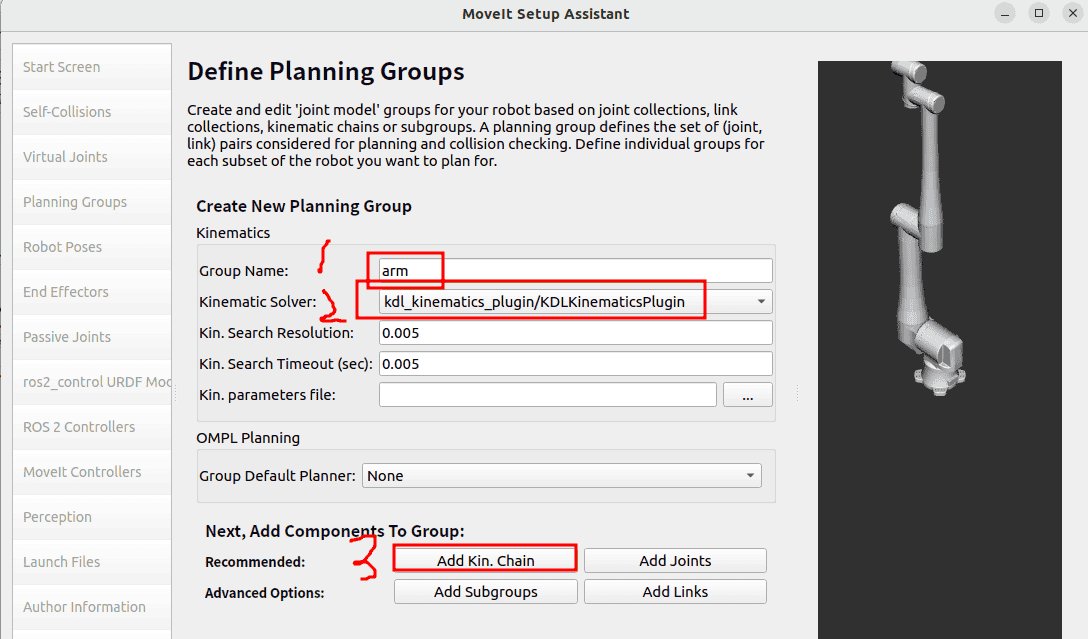
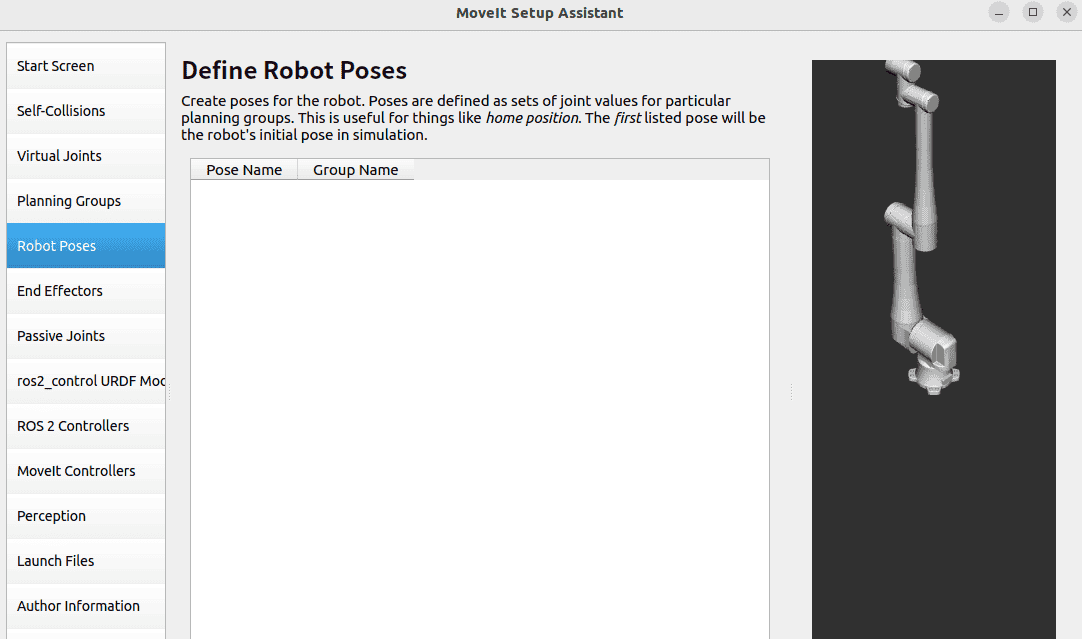
定义机械臂规划组
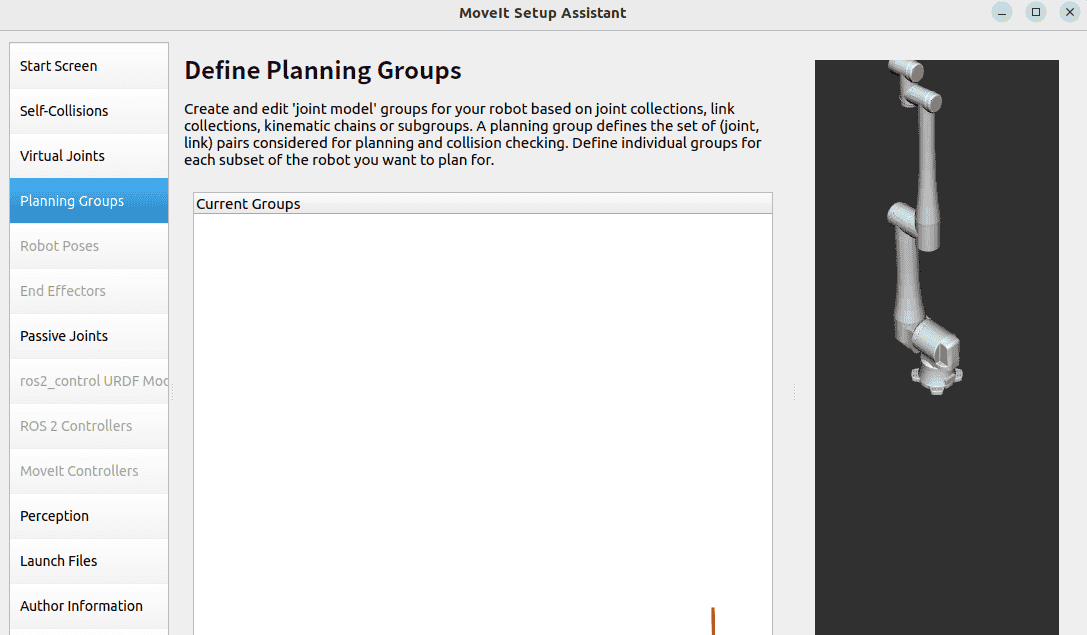
定义规划组的名称、规划算法、以及需要规划的运动链
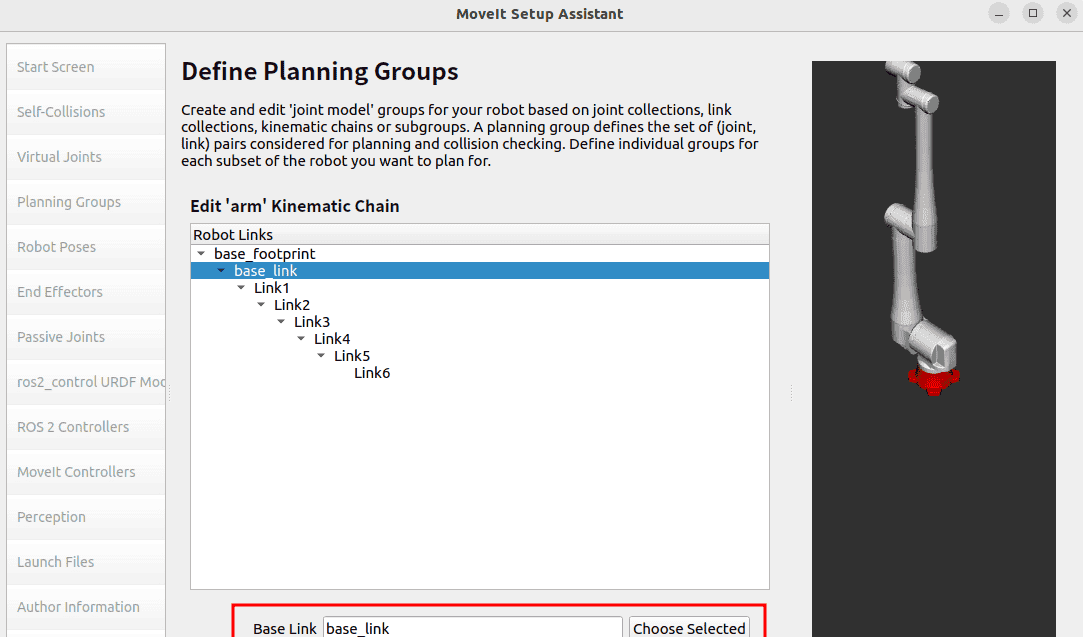
 选择运动链的基连杆与末端连杆
选择运动链的基连杆与末端连杆
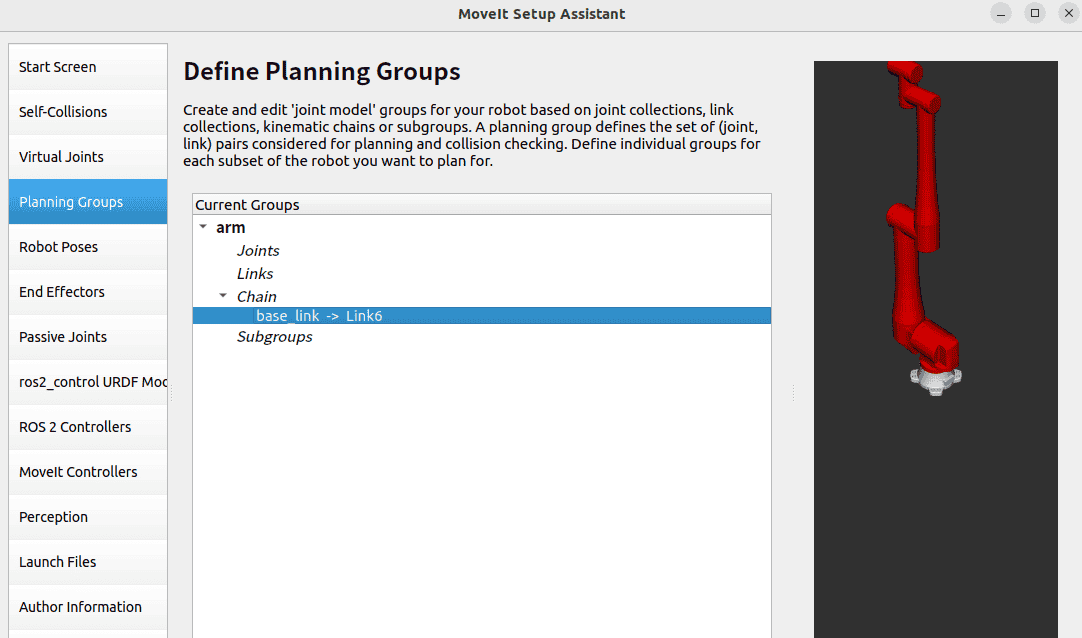
生成一个名为”arm”的规划组
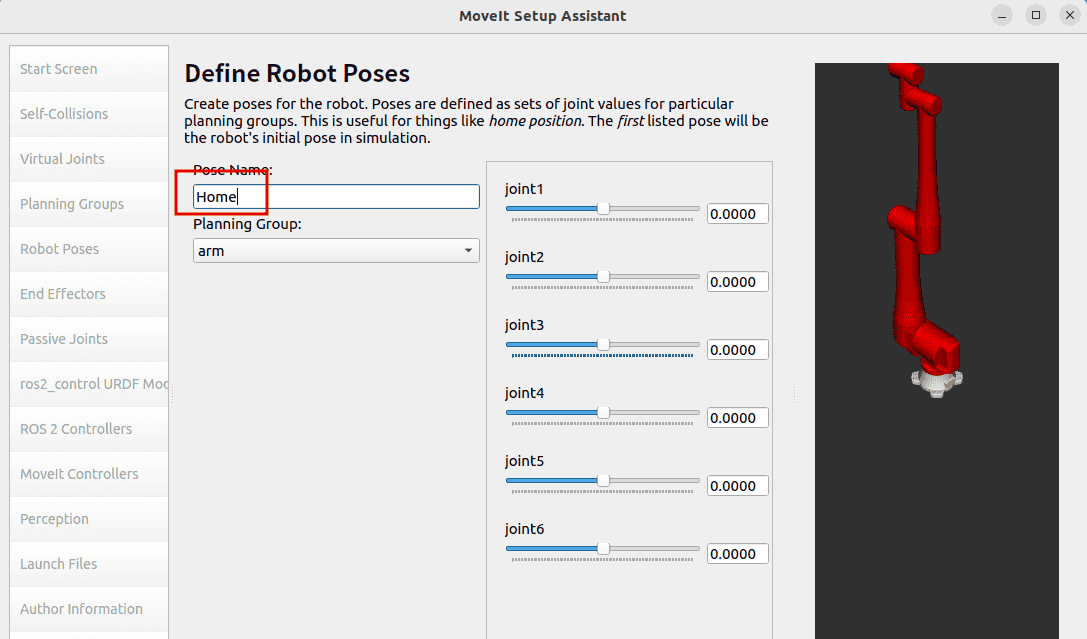
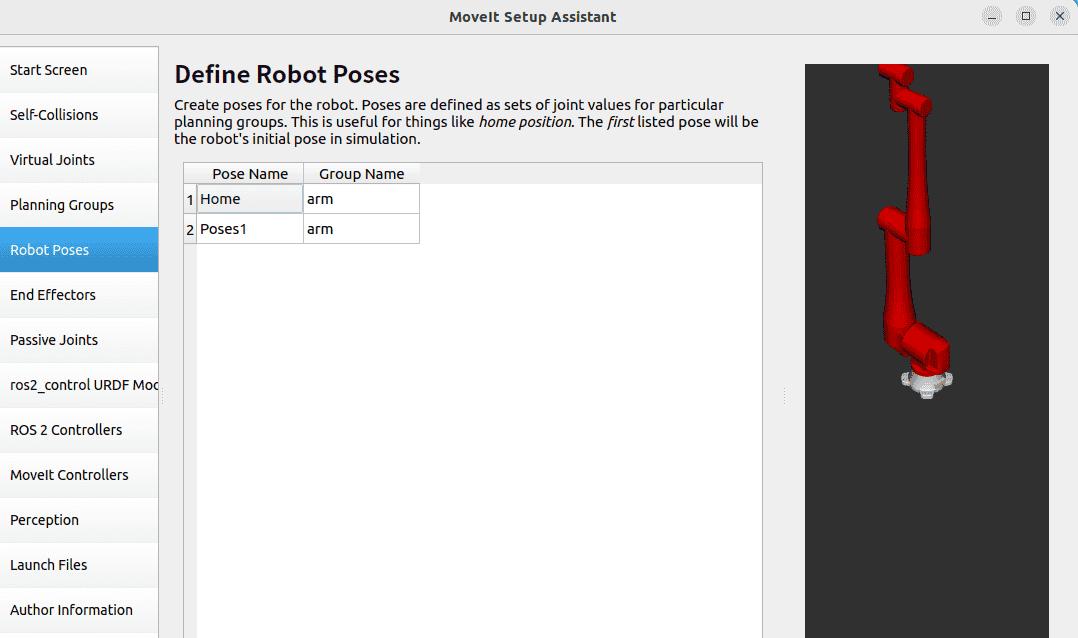
定义一些机械臂构型组
定义一个名为“Home”的构型
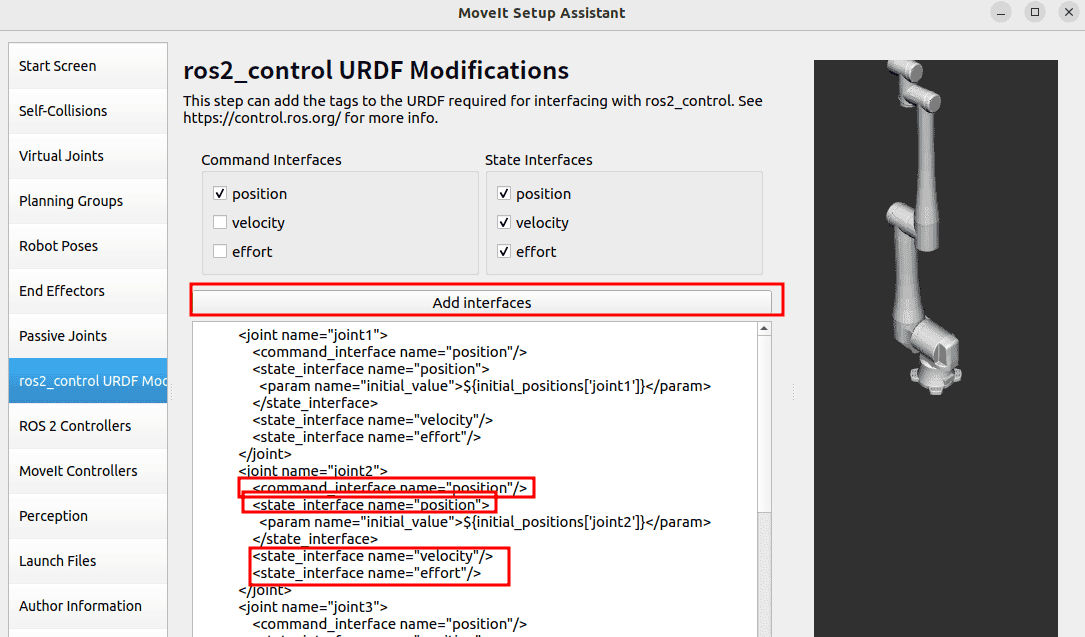
配置ros2_control的URDF,即增加机械臂命令控制接口与状态感知接口。
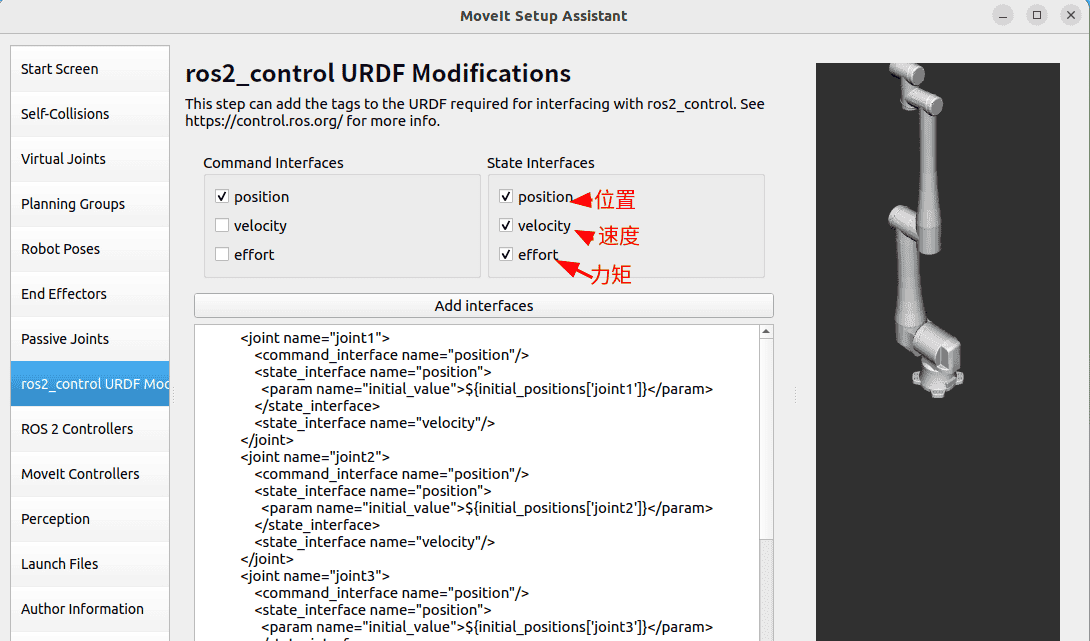
这里不要勾选effort,上图是错误的
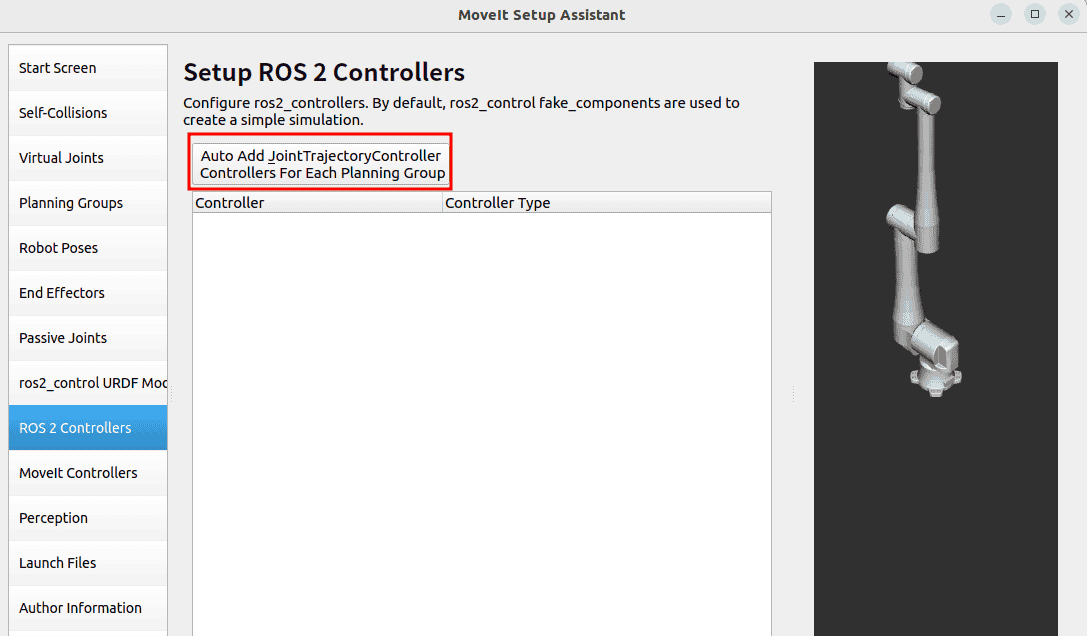
点击“Auto add”,自动添加ros2 controllers
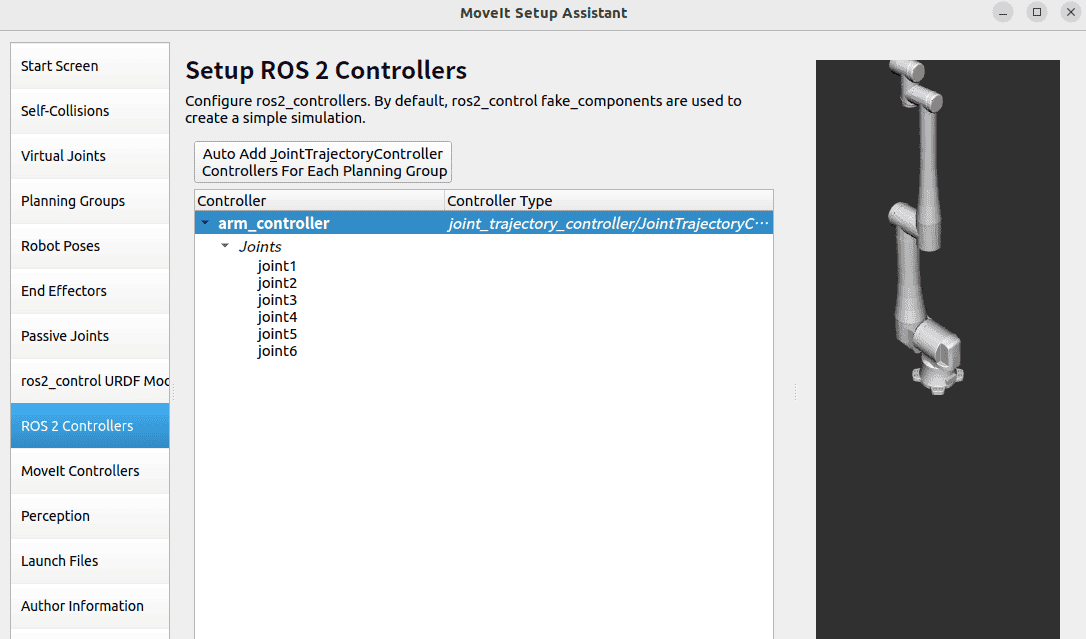
针对上述构建的”arm”规划组,自动生成一个”arm_controller”
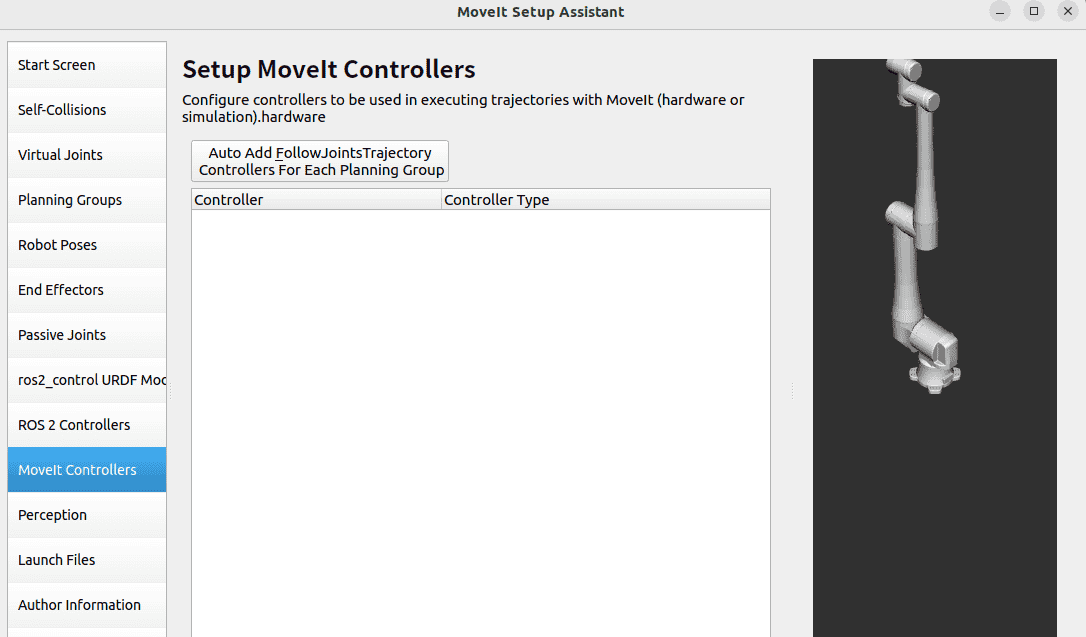
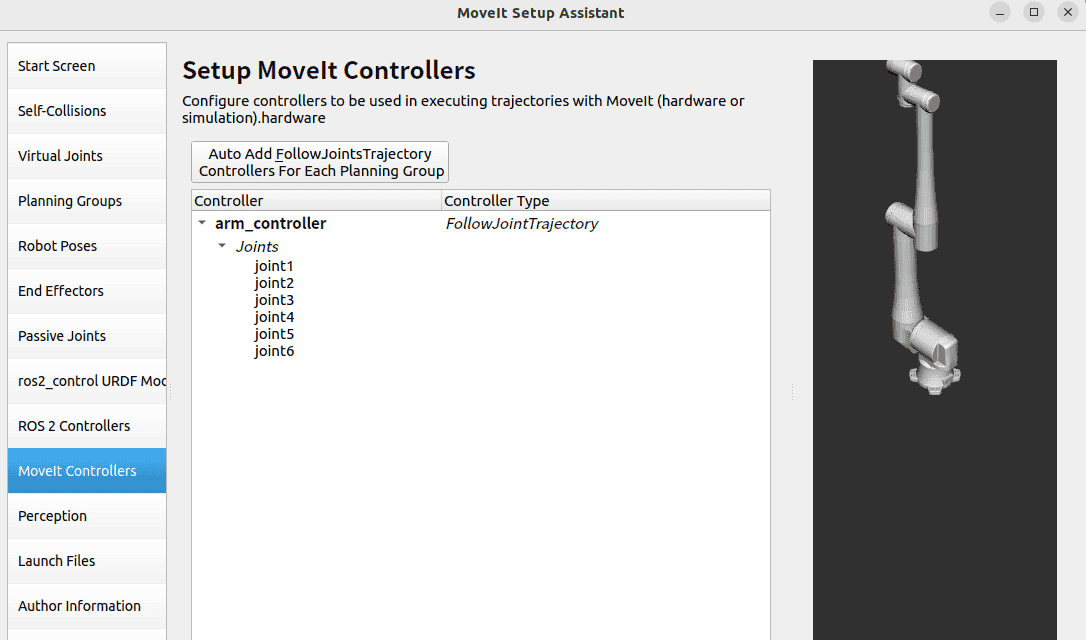
点击“Auto add”,自动添加moveit controllers
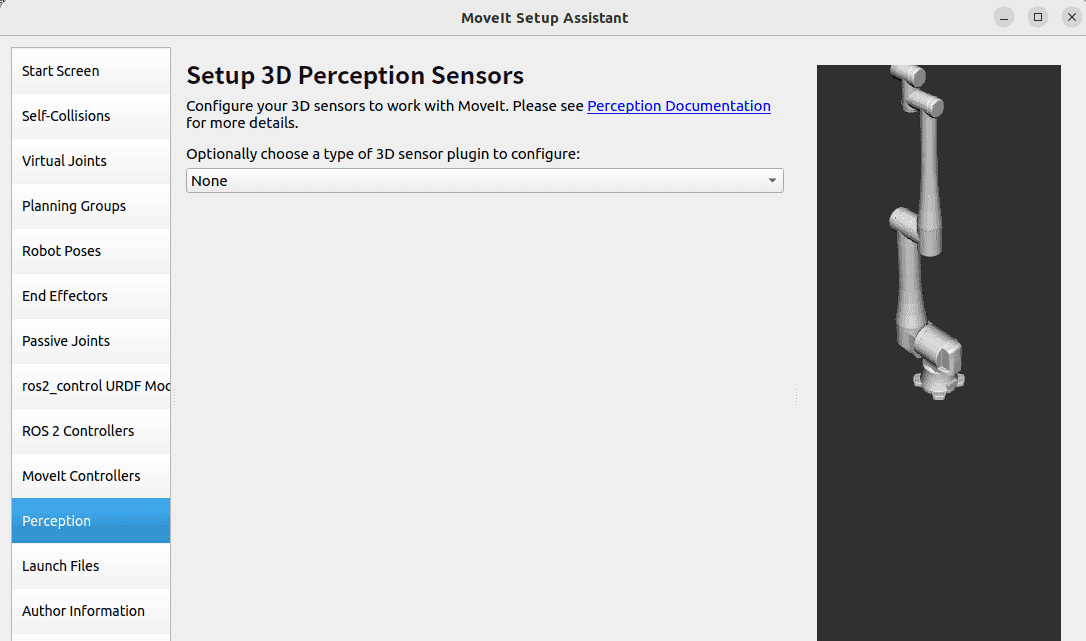
配置Point Cloud和Depth Map
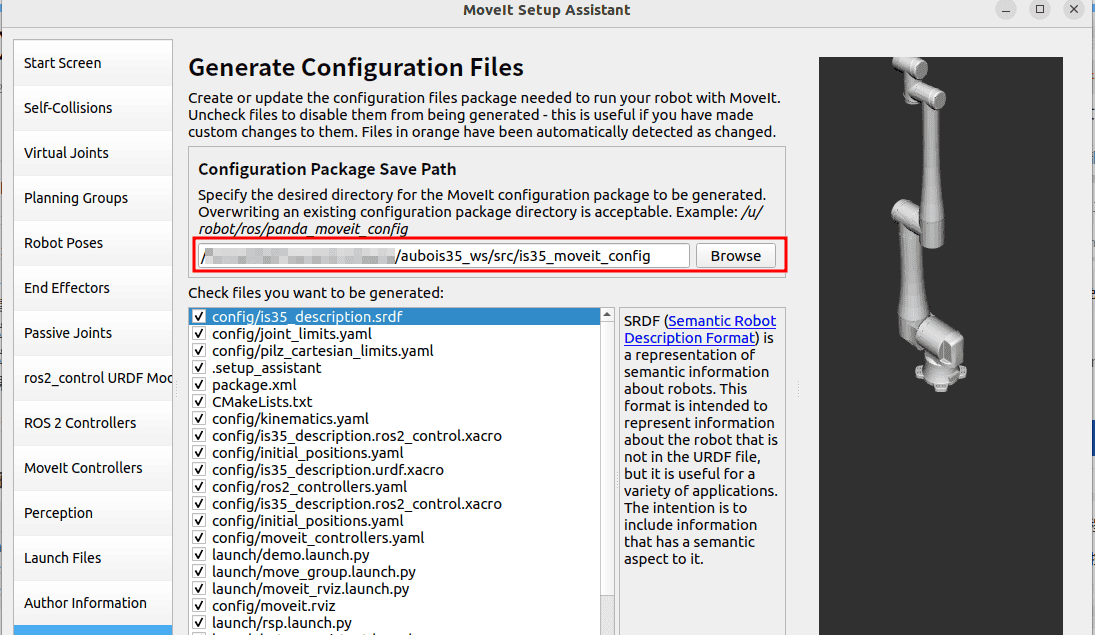
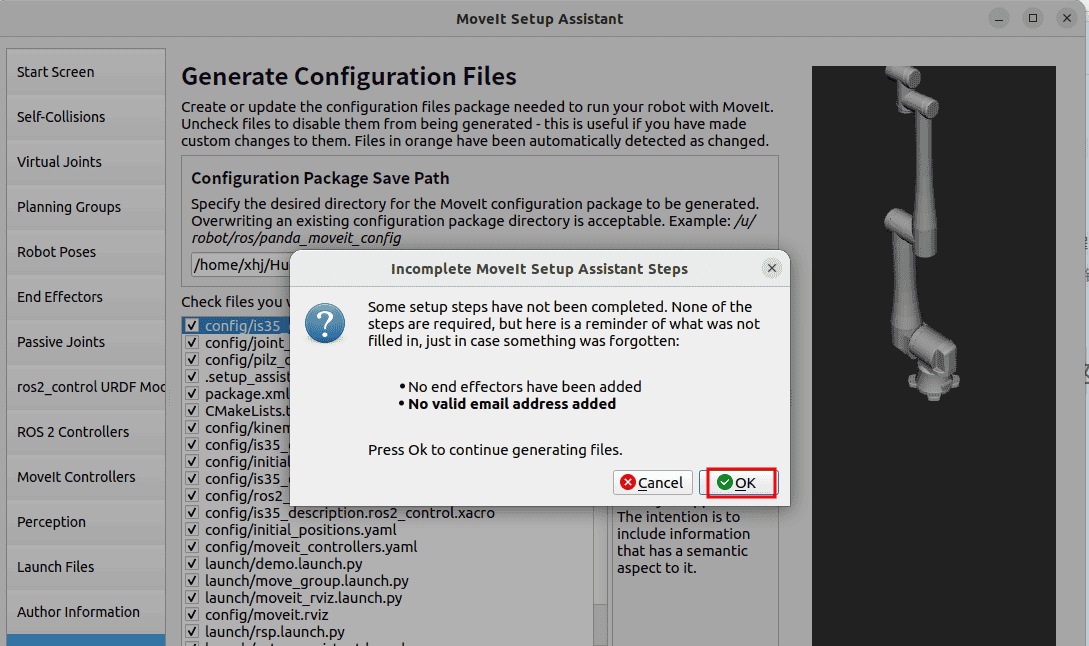
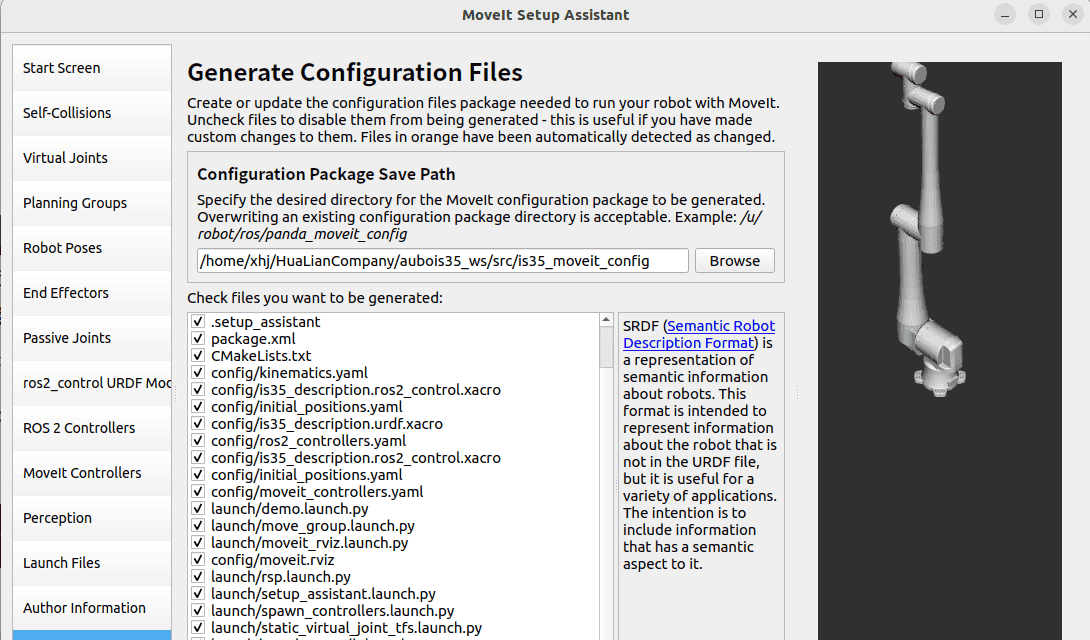
生成配置文件
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...