使用轮趣科技的G90模块实现RTK差分定位(UPrecised的使用、CORS账号注册、配置RTK、搭配4G DTU接入RTK、Ubuntu20.04-ROS1 调试)
首先下载轮趣官方文件:WHEELTEC G90双天线定位模块产品资料
链接: https://pan.baidu.com/s/1DylwAarob5WvgbDtZaI8xg
【该链接文件可以极速下载,单次可保存5万个文件】
该操作过程总结自 “WHEELTEC G90双天线定位模块产品资料”
增加部分个人操作中遇到的问题,方便调试
使用流程(请在室外开阔区域调试):
1. 下载上位机UPrecise:
网址:unicorecomm.com/products/detail/57
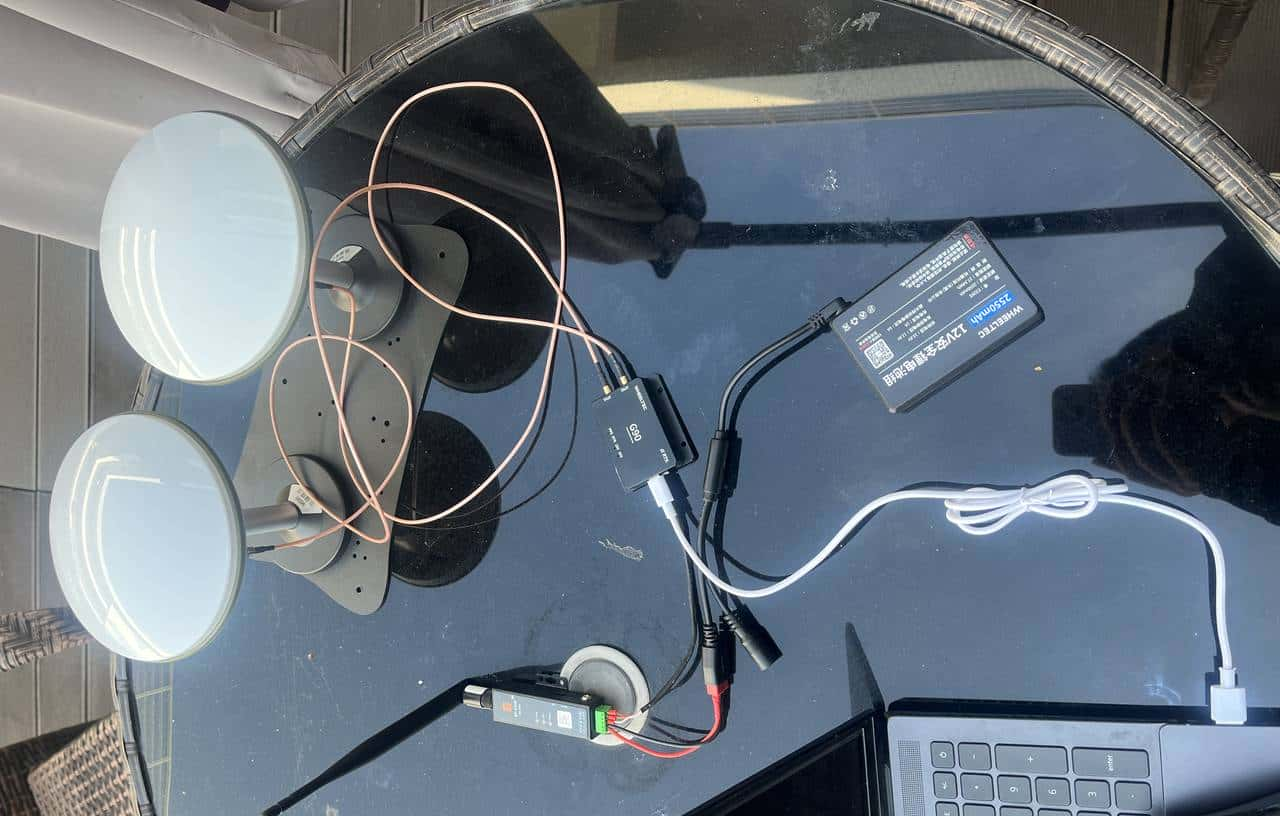
2. G90 模块接线:
用 type-c 将 G90 模块连接至电脑,并将主(及从)天线连接到 G90 模块。
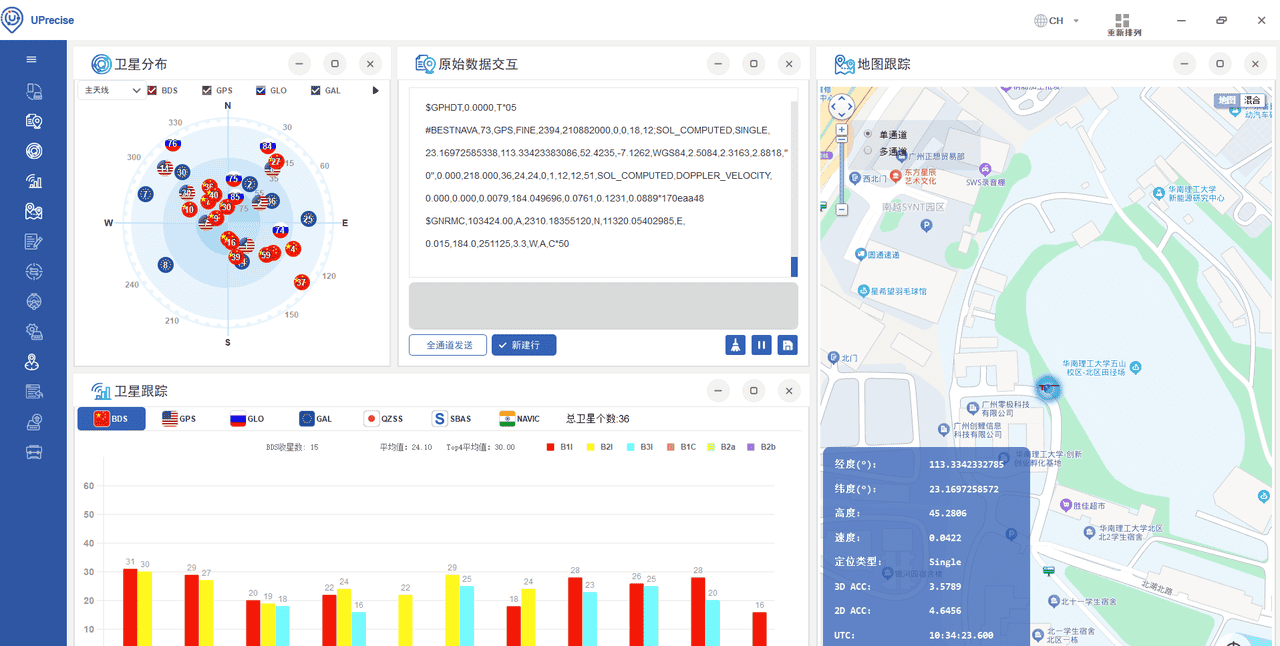
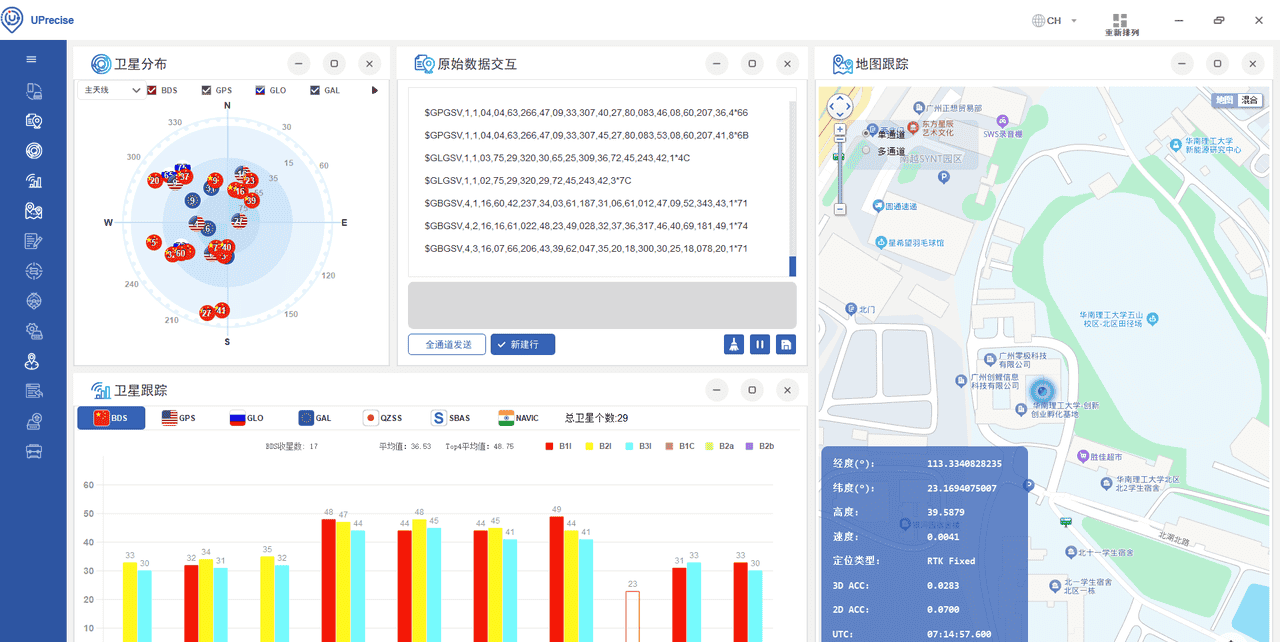
3. 打开上位机UPrecise:
选择端口,其他保持默认,点击连接。
原始数据交互窗口出现原始数据,并可以查看卫星分布、卫星跟踪及地图跟踪,但此时右下角“定位类型”仍为“Single”(单点定位)。
4. 注册千寻账号
千寻网址:千寻位置网-时空智能 共创数字中国
依次完成:
> 注册千寻账号并完成认证
> 点击进入右上角“控制台”
> 点击进入右上角“免费试用”
> 选择“千寻知寸-FindCM”的“免费试用”
> 返回“控制台”
> 点击进入“最近购买的产品”旁边的“更多”
> 点击进入“千寻知寸-FindCM”的对应服务
> 选择“激活”
> 返回“控制台”
> 点击进入“千寻知寸-FindCM”对应的“账密信息”,并记下“差分账号”和“差分密码”
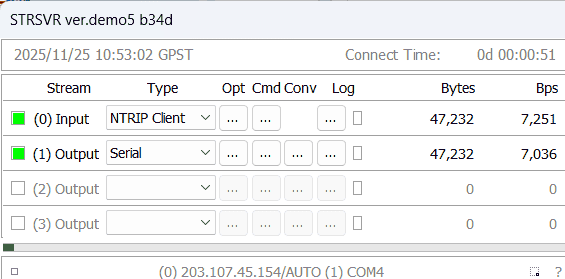
5. 在 STRSVR 工具配置 RTK
在 PC 端联网的前提下,打开 STRSVR 工具。
接线:将 G90 模块的串口2通过 232 转 USB模块 接入 Windows【G90调试线颜色说明:红色-GNS,橙色-TX,白色-RX】,另外 G90 主串口通过 TypeC数据线 接入 Windows 电脑中。
依次完成以下操作:
>【Input】 :
【Type】选择【NTRIP Client】
【Opt】输入:
NTRIP Caster Address:203.107.45.154Port:8002
User ID:填入你的“差分账号”
Password:填入你的“差分密码”
然后点击【Get Mountp】并在【Mountpoint】中选择【Auto】
点击【OK】完成设置
>【Onput】:
【Type】 选择【Serial】
【Opt】输入:
Port :选择你“232 转 USB 模块”对应的COM
Bitrate(bps):115200
点击【OK】完成设置
>【Options…】:
【Relay Messages】选择【(1)->(0)】
点击【OK】完成设置
> 点击【Start】连接 CORS 服务器,此时【Input】和【Output】前面变成绿色表示连接成功。在右侧有数据量传输情况
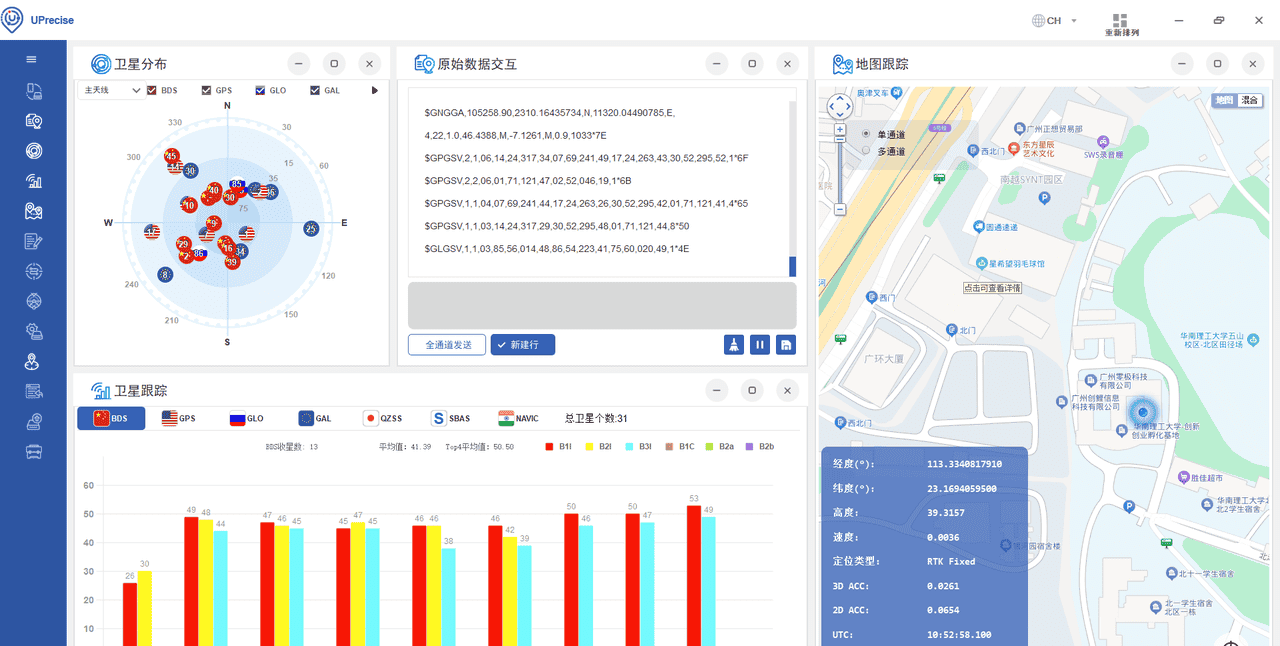
> 打开上位机UPrecise,此时可以在右下方看到定位类型变为【RTK Fixed】,且模块的 RTK 灯会亮起。
6. 搭配4G DTU接入RTK

依次完成:
> 安装SIM卡 & 胶棒天线到4G DTU(在 DTU 通电的情况下严禁插拔 SIM 卡)。
> 232转USB模块分别连接DTU的GND、RX和TX端口,另一端USB口接入调试使用的笔记本。
> 将 4G DTU 模块电源 DC头接接适配器连接电源,此时 4G 模块的指示灯会亮起。
> 打开4G DTU 配置工具,选择串口号,波特率默认为 115200,点击【打开串口】。
> 先点击【进入配置】,再点击【读取配置】,等待参数获取成功后再写入参数。
> 配置 CORS 相关信息,在发送窗口输入指令:
> AT+NTRIP=addr,port,user,password, mount
(其中 addr 为 Ntrip 服务器地址,port 为端口号,user 与 password 是 CORS 账号和
密码,mount 为挂载点。)> 如:AT+NTRIP=203.107.45.154,8002,aaaabbbb,1aa2bb3cc,AUTO
> 按一下”shift+Enter”键后再点击发送,发送成功后会返回【OK】。
> 点击保存参数,窗口会返回【设置并保存参数成功】(!!!)
> 点击【退出配置】(!!!)
> 点击【关闭串口】(!!!)
(成功接入 RTK 后,4G 通信模块的亮灯情况为:Power 灯常亮,Work 灯闪烁,Data 灯闪烁)
WHEELTEC G90 出厂前已配置好串口 2 输出。如进行了恢复出厂设置或修改串口配置的用户,请参考轮趣文档“WHEELTEC_G90用户手册”中的“配置串口 2 输出”进行配置
搭配4G DTU接入RTK常见问题解决:
方法一:
参考轮趣文档“GNSS+4G DTU无RTK排查手册”进行排错
方法二:
1. 4G DTU配置好后,在4G DTU 配置工具查看已配置的cors账号密码指令:AT+NTRIP
2. 4G DTU配置好后,验证是否成功连接Ntrip服务器:在WHEELTEC 串口助手发送一条GGA报文,4G模块会返回RTCM差分校正信号
3. 点击4G DTU 配置工具的【驻网状态】可以查看4G DTU是否成功连接网络
我遇到的问题:
1. 4G DTU 配置工具版本问题导致配置 CORS 相关信息失败
2. 挂载点不支持
解决办法:
1. 和轮趣客服要新的版本
2. 更换挂载点
7. Ubuntu20.04-ROS1 调试
7.1. Windows
在 Windows 中需要把 WHEELTEC G90 模块上的 CH9102 芯片串口号改为0005,用 USB 线把惯导模块连接电脑,通过修改串口号软件CH34xSerCfg.exe,修改并固定,操作如下图:
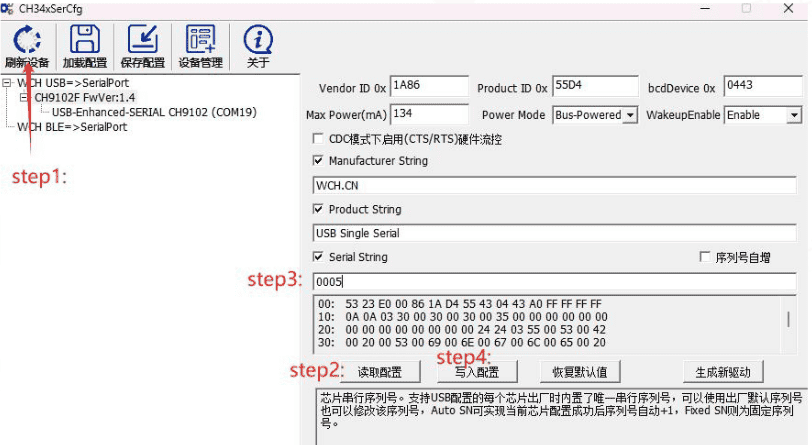
7.2. Ubuntu20.04
将官方提供的功能包及设备创建别名脚本放到自己的工作空间下,包括:

cd lio_sam_ws
catkin_make编译时可能遇到的报错:
1、Could not find a package configuration file provided by “catkin_virtualenv”解决办法:sudo apt install ros-noetic-catkin-virtualenv
2、ERROR: launchpadlib 1.10.13 requires testresources, which is not installed.
解决办法:
sudo apt install python3-testresources
3、ERROR: ModuleNotFoundError: No module named 'serial'.
解决办法:sudo apt install python3-pip
pip3 install serial
pip3 install pyserial4、ERROR:ModuleNotFoundError: No module named 'pyproj'
解决办法:pip install pyproj
安装依赖:
sudo pip3 install transforms3d
sudo apt install ros-noetic-tf-transformations或一键安装依赖:
rosdepc install –from-paths src –ignore-src -r -y
cd src
sudo chmod 777 wheeltec_gnss.sh
sudo sh wheeltec_gnss.sh
ll /dev
(可以查看到G90模块)
(已经显示成功用 wheeltec_gnss 这个别名来代表 G90 模块了,后续不管接到哪个 USB 口,使用的时候均不需要考虑端口号变化问题。)
#使用NMEA协议解析WHEELTEC G90:
roslaunch wheeltec_gps_driver wheeltec_dual_rtk_driver_nmea.launch
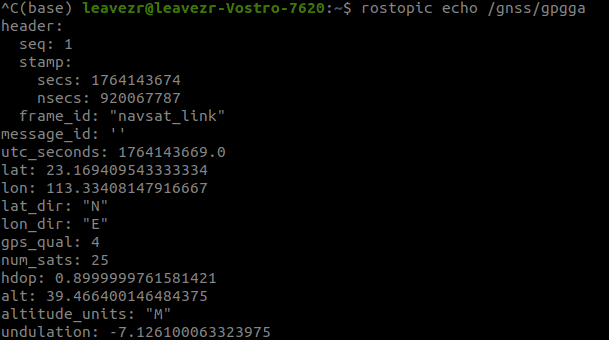
#查看gps话题信息:
rostopic info /gps/fix
rostopic echo /gps/fix 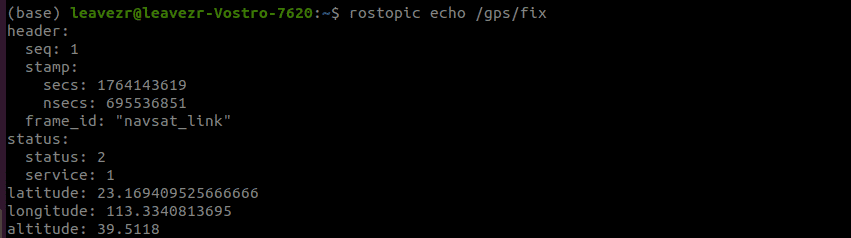
#查看定位方式:
rostopic echo /gps/nmea_sentence gps_qual 解析为 GPS 状态:
0=未定位,
1=单点定位
2=伪距/SBAS
3=无效 PPS
4=RTK 固定解5=RTK 浮动解
6=正在估算
7=手动启动基准站
8=RTK 宽巷解
9=伪距
#查看报文话题信息:
rostopic echo /gps/nmea_sentence
单天线无航向角信息。
双天线时,默认左右安装,以车辆前进方向为参考,从天线应安装在左侧,主天线安装在右侧。该方式对应参数 rotation = 90。
若前后安装,需修改参数 rotation = 0(wheeltec_gps_driver/launch/wheeltec_dual_rtk_
driver_nmea.launch)无论单/双天线,定位信息均以主天线蘑菇头中心位置为原点。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...