阅读此文前,麻烦您点击一下“关注”,方便您进行讨论和分享。此文仅在今日头条发布,任何平台不得搬运,搬运必究!

激光雷达SLAM算法综述
激光雷达SLAM:自动驾驶的眼睛,究竟有多“亮”?
自动驾驶,这个曾经只存在于科幻电影中的概念,如今正一步步走进现实。而在这场技术革命的浪潮中,激光雷达SLAM技术就像自动驾驶汽车的“眼睛”,扮演着至关重大的角色。它究竟有多“亮”,能看多远,看多清?今天,我们就来扒一扒这个让自动驾驶汽车“慧眼识珠”的幕后英雄。
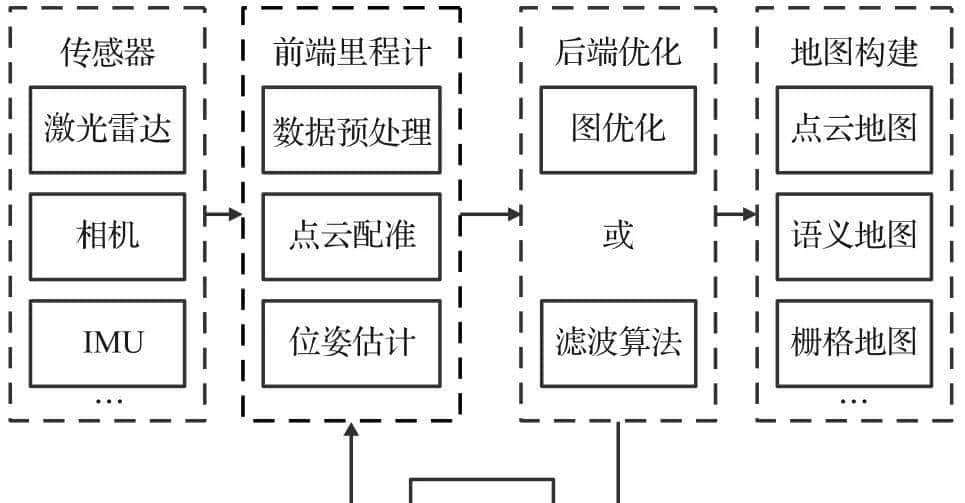
想象一下,你蒙着眼睛在陌生的房间里走动,你需要不断地摸索周围的环境,才能慢慢建立起对这个房间的认知。而激光雷达SLAM技术,就相当于赋予了自动驾驶汽车这种“摸索”的能力。它通过发射激光束,测量激光返回的时间,从而准确感知周围环境的距离和形状,并实时构建地图,同时确定自身位置。
这就好比蝙蝠利用回声定位在黑暗中飞行。激光雷达不断地向周围发射激光“声波”,然后根据反射回来的“回声”绘制出周围环境的“地图”,并知道自己身处何方。有了这张地图和自身位置信息,自动驾驶汽车就能像一位经验丰富的司机一样,在复杂的道路环境中游刃有余地行驶。
激光雷达SLAM技术的发展历程,就像一部精彩的科技进化史。从最初的2D激光SLAM,到如今的3D激光SLAM,再到与深度学习、多传感器融合等技术的结合,激光雷达SLAM技术不断突破自身局限,向着更高精度、更强鲁棒性、更广泛应用的方向发展。
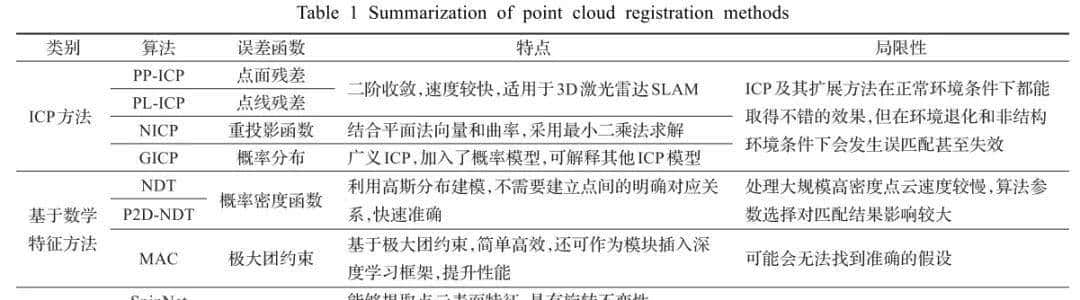
早期的2D激光SLAM算法,例如GMapping、Hector-SLAM等,主要应用于室内环境。它们就像一位“近视眼”,只能看到二维平面上的信息,对于复杂的三维环境就显得力不从心了。而随着技术的进步,3D激光SLAM算法,例如LOAM、LeGO-LOAM等,横空出世。它们就像一位拥有“千里眼”的超人,能够精准地感知三维空间,构建出更加精细、更加完整的地图。
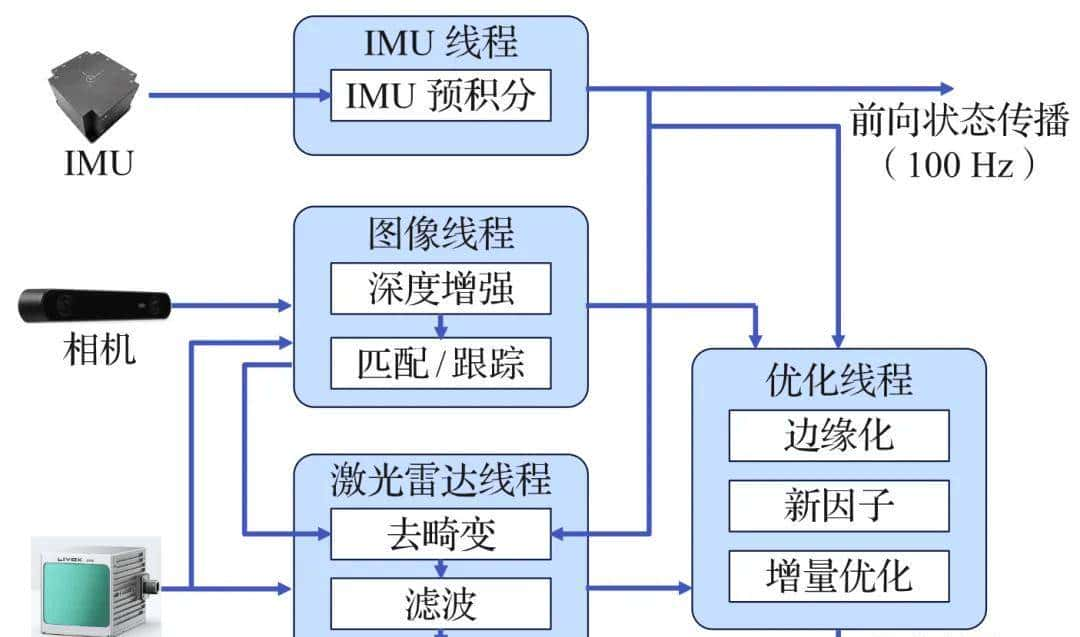
不过,即使是“千里眼”,也难免会受到环境因素的影响。在光照变化剧烈、动态物体较多等复杂场景下,激光雷达SLAM技术的性能会受到必定程度的限制。为了解决这个问题,研究人员开始探索多传感器融合的方案,将激光雷达与IMU、相机、GPS等其他传感器结合起来,优势互补,取长补短。
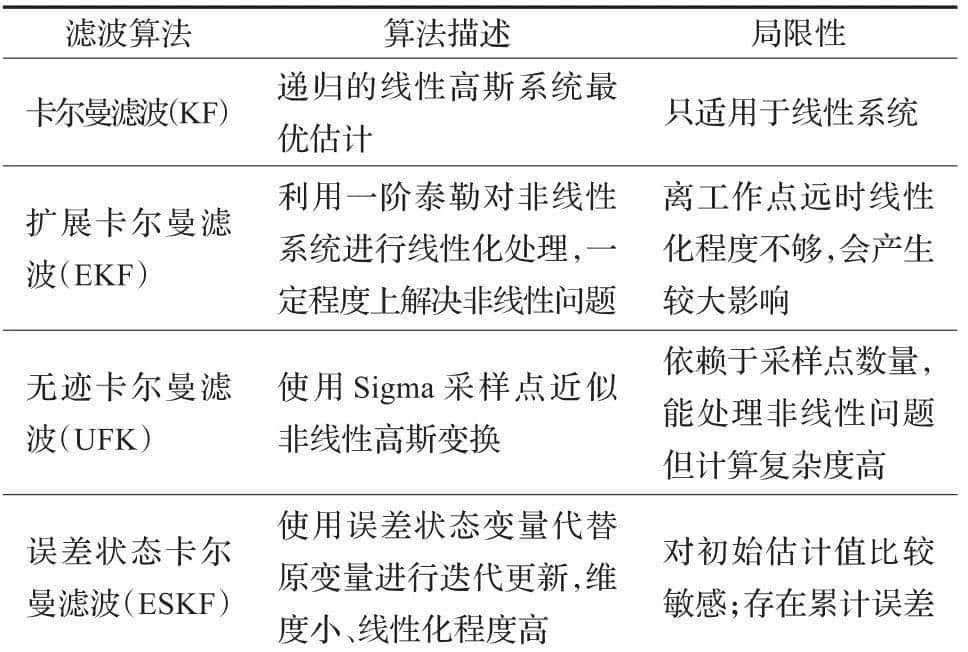
例如,LIO-SAM、LVI-SAM等算法,就将激光雷达与IMU进行了紧耦合,利用IMU的高频运动信息来校正激光雷达的运动畸变,提高了SLAM系统的精度和鲁棒性。而R3LIVE、FAST-LIVO等算法,则进一步融合了视觉信息,使得SLAM系统在光照变化剧烈的场景下也能稳定运行。
更令人兴奋的是,深度学习技术的引入,为激光雷达SLAM技术的发展注入了新的活力。深度学习就像一位“智慧大脑”,能够从海量的数据中学习规律,并将其应用于SLAM系统的各个模块,例如特征提取、匹配、姿态估计等。例如,FCGF、SpinNet等深度学习模型,就能够提取更加鲁棒的点云特征,提高SLAM系统的精度和效率。
未来,激光雷达SLAM技术将继续向着更高、更快、更强的方向发展。结合深度学习、多传感器融合、分布式多智能体协同作业等技术,激光雷达SLAM技术将在自动驾驶、机器人、测绘等领域发挥越来越重大的作用。
我们可以预见,未来的自动驾驶汽车将拥有更加“明亮”的“眼睛”,能够更加精准地感知周围环境,更加安全、更加智能地在道路上行驶。而激光雷达SLAM技术,也将继续引领这场技术革命,为我们创造更加美好的未来。
让我们一起畅想一下未来:
在一个阳光明媚的早上,你坐进一辆自动驾驶汽车,准备开始一天的旅程。你只需要告知汽车你的目的地,然后就可以放松身心,享受沿途的景色。汽车会自动规划最佳路线,避开拥堵路段,并在遇到障碍物时及时停车。
当你行驶在高速公路上时,汽车会自动保持安全车距,并根据路况调整车速。即使在夜间或者恶劣天气条件下,汽车也能凭借其强劲的感知能力安全行驶。
当你到达目的地后,汽车会自动寻找停车位,并完成泊车操作。你只需要下车,然后开始你的一天。
这一切,都离不开激光雷达SLAM技术的支持。它就像自动驾驶汽车的“眼睛”,让汽车能够“看清”周围的世界,并做出正确的决策。
未来,激光雷达SLAM技术将继续发展,为我们带来更加安全、更加便捷、更加智能的出行体验。让我们一起期待,这个充满科技感的美好未来!
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...